AUV (autonomous underwater vehicle) three-dimension curve path tracking control method based on iteration
An underwater vehicle and path tracking technology, applied in three-dimensional position/channel control and other directions, which can solve the problems of inability to achieve global convergence of AUV tracking and inability to ensure the asymptotic stability of the control system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
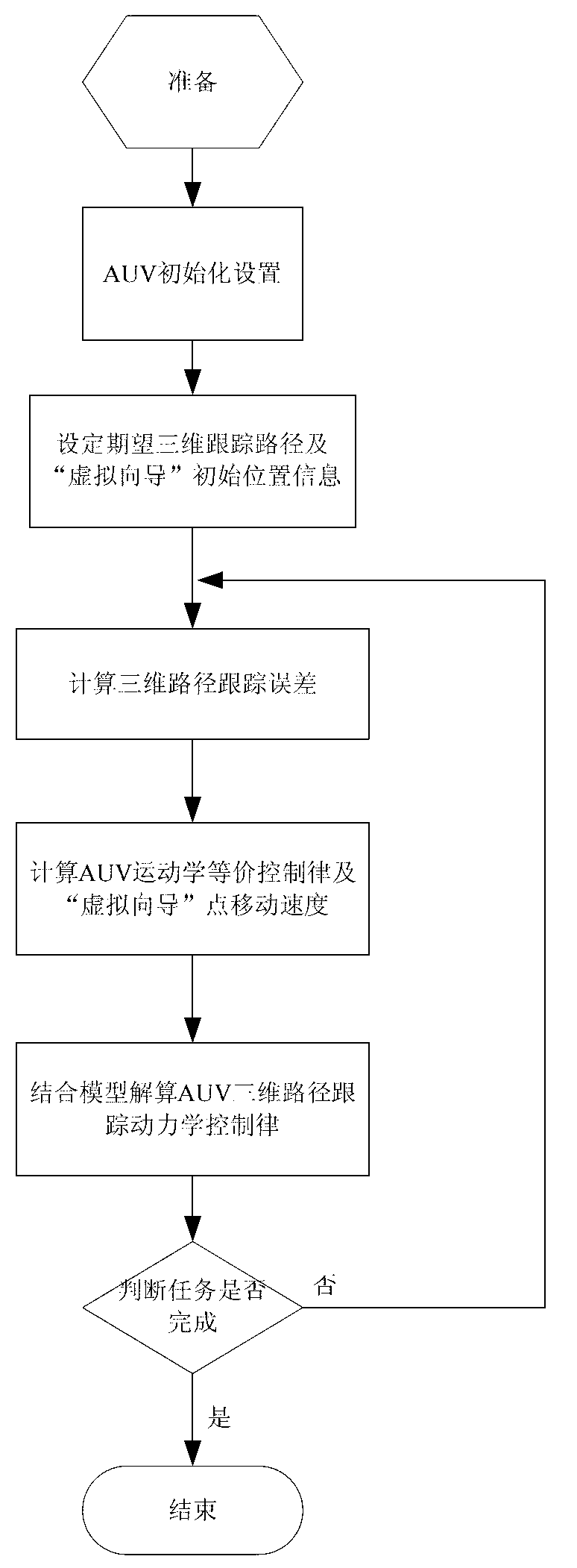
[0020] The following examples describe the present invention in more detail:
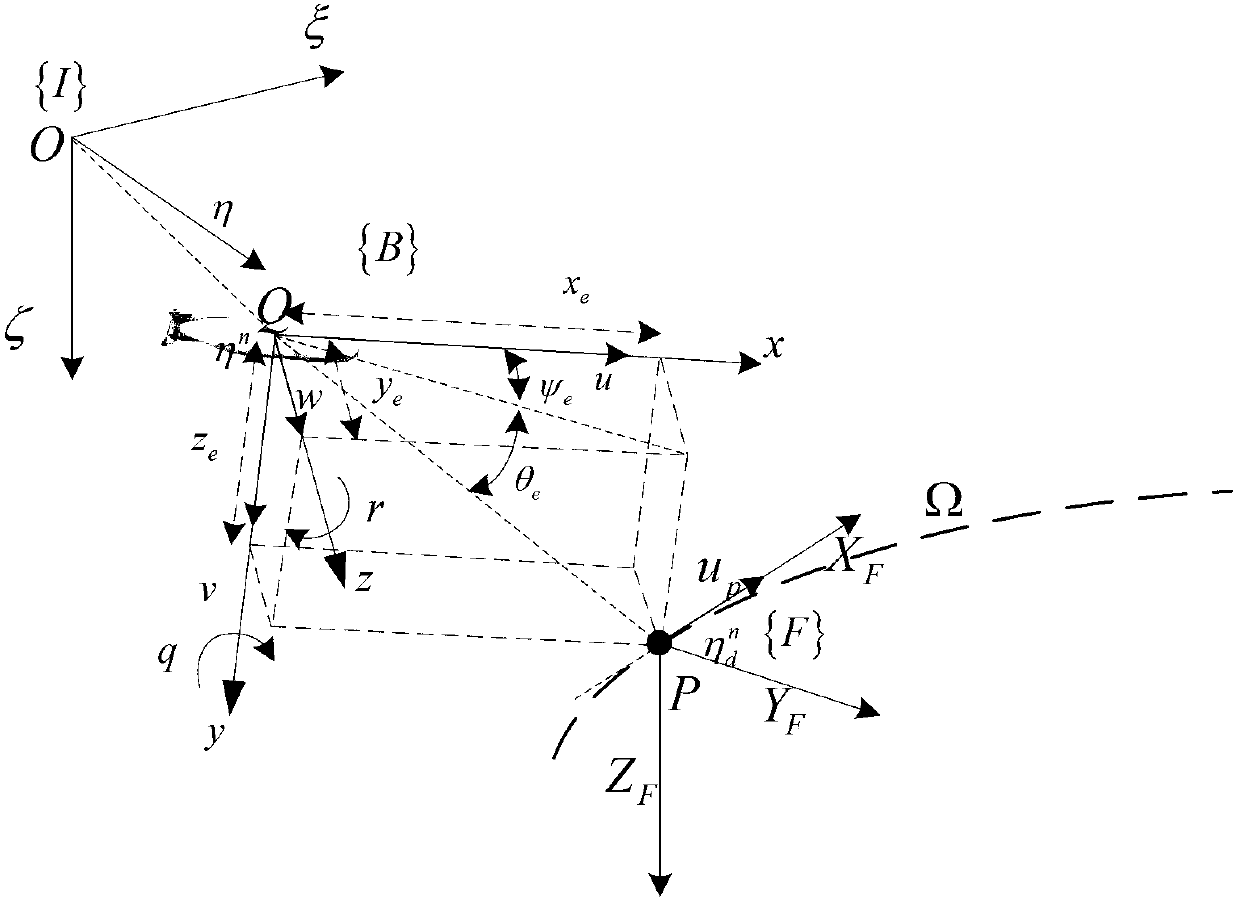
[0021] For the given desired tracking path Ω in step 1, the coordinates of the virtual guide P in the fixed coordinate system can be expressed as a function of a certain scalar parameter s∈R as
[0022] η d n ( s ) = [ x d ( s ) , y d ( s ) , z d ( s ) ] T - - - ( 1 ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com