Navigation method and device based on extended Kalman filter
A technology for extended Kalman and navigation methods, applied in the field of navigation methods and devices based on extended Kalman filtering, which can solve problems such as long execution time, large memory space, and consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0105] The present invention will be further described below in conjunction with the embodiments and drawings, but the implementation of the present invention is not limited thereto.
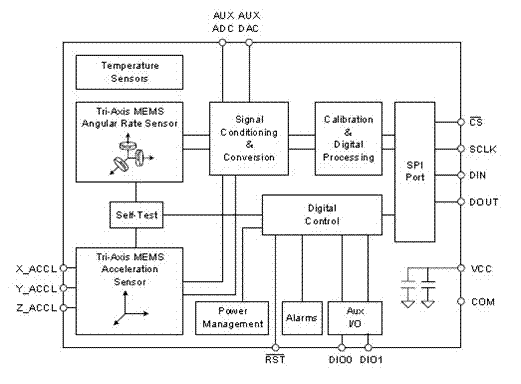
[0106] Such as Figure 2-4 Shown, the embodiment of the present invention adopts arm7 (three-stage pipeline with 0.9MIPS / MHz and Von Neumann structure) series microprocessor, the inertial measurement unit IMU that the model is ADIS16350 and the electronic compass COMPASS that the model is PNI11096.
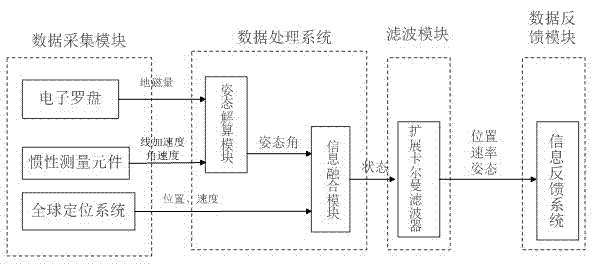
[0107] figure 1 It is a structural block diagram of a navigation system device, including a data acquisition module, a data processing system, an extended Kalman filter and a data feedback module.
[0108] The data acquisition module is composed of inertial measurement unit IMU, electronic compass COMPASS and global positioning system. Use IMU to get angular velocity and linear acceleration. The IMU data is obtained through the SPI port. When reading the data in the sensor, first give the regist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com