Catheter robot system for minimally invasive interventional operation in blood vessel
A robotic system and minimally invasive intervention technology, applied in the field of robotic systems, can solve problems such as unintuitiveness, high requirements for doctors' operating skills and experience in intubation, and influence, to ensure accuracy and stability, avoid X-ray radiation, and assist effect of surgery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
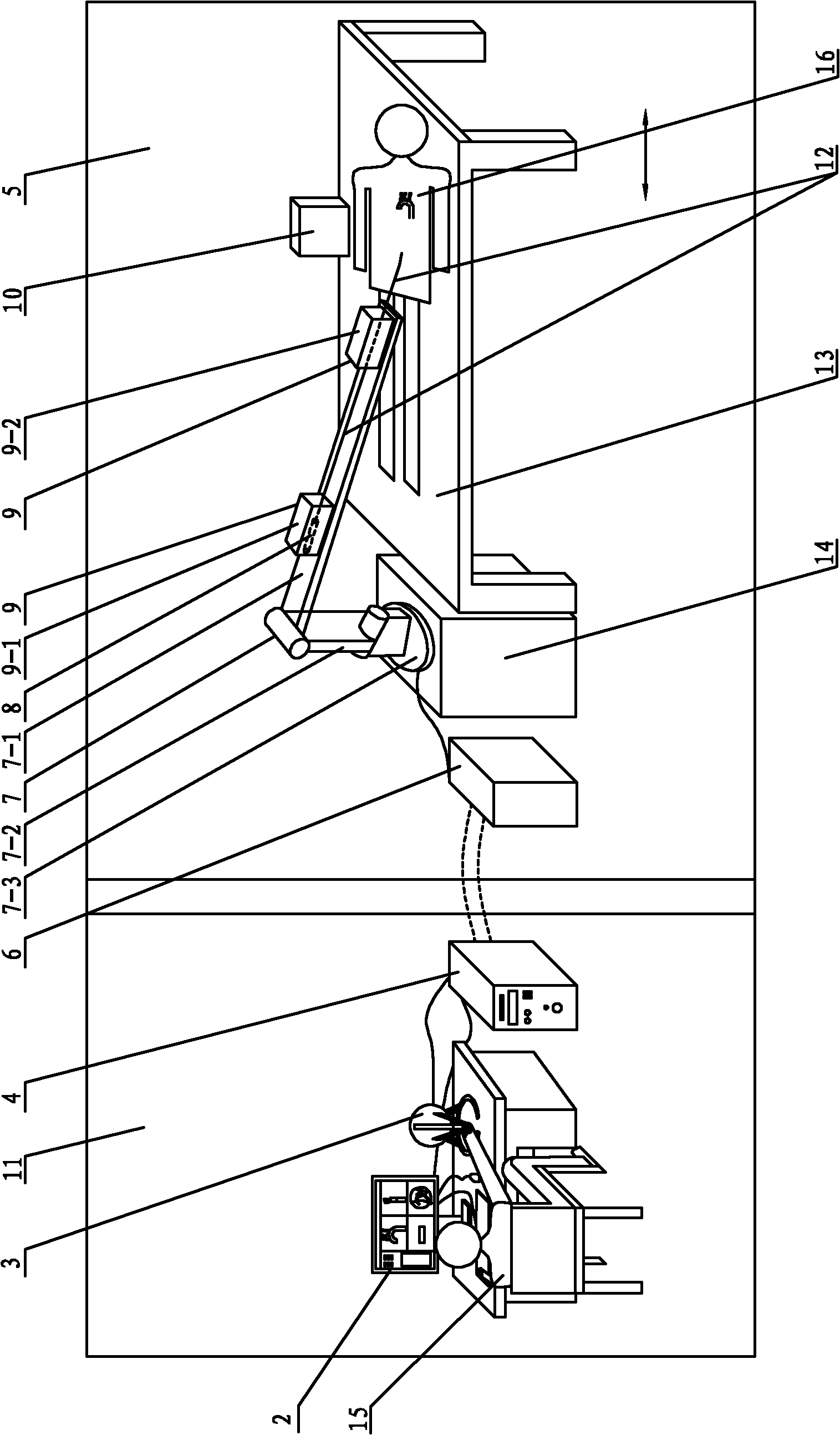
[0007] Specific implementation mode one: combine Figure 1 to Figure 8 , Figure 12 , Figure 13 and Figure 22 ~ Figure 27Explain that the system in this embodiment includes a display 2 for displaying three-dimensional virtual guidance images, a main handle 3 and a computer host 4; Handle 8, master-slave interventional device 9, magnetic field generator 10, controllable catheter 12 and mechanical arm fixing base 14; master-slave interventional device 9 includes handle manipulation mechanism 9-1 and catheter manipulation mechanism 9-2; displays three-dimensional virtual guide image The display 2, the master handle 3 and the computer host 4 are respectively arranged in the control room 11, and the control cabinet 6, the mechanical arm 7, the catheter handle 8, the master-slave intervention device 9, and the magnetic field generator are installed in the control room 11. The device 10, the controllable catheter 12, and the fixed base 14 of the mechanical arm are respectively a...
specific Embodiment approach 2
[0009] Specific implementation mode two: combination figure 1 , Figure 5 and Figure 6 Note that the catheter handle 8 in this embodiment includes the handle inner sliding sleeve 8-1, the handle outer sliding sleeve 8-3, the limit screw 8-4 and one or two rubber rings 8-2; the handle outer sliding sleeve 8- One end of 3 is an open end, and the other end of the outer sliding sleeve 8-3 of the handle is a closed end, and the closed end of the outer sliding sleeve 8-3 of the handle is provided with a position sensor lead wire passing through the hole 8-3-1, and the inner sliding sleeve of the handle is 8-3-1. One end of the sleeve 8-1 is set in the inner cavity of the handle outer sliding sleeve 8-3, and one or two rubber rings 8-2 are arranged between the handle inner sliding sleeve 8-1 and the handle outer sliding sleeve 8-3, and the handle The outer sliding sleeve 8-3 and the inner sliding sleeve 8-1 of the handle are slidably matched in the axial direction (the function of...
specific Embodiment approach 3
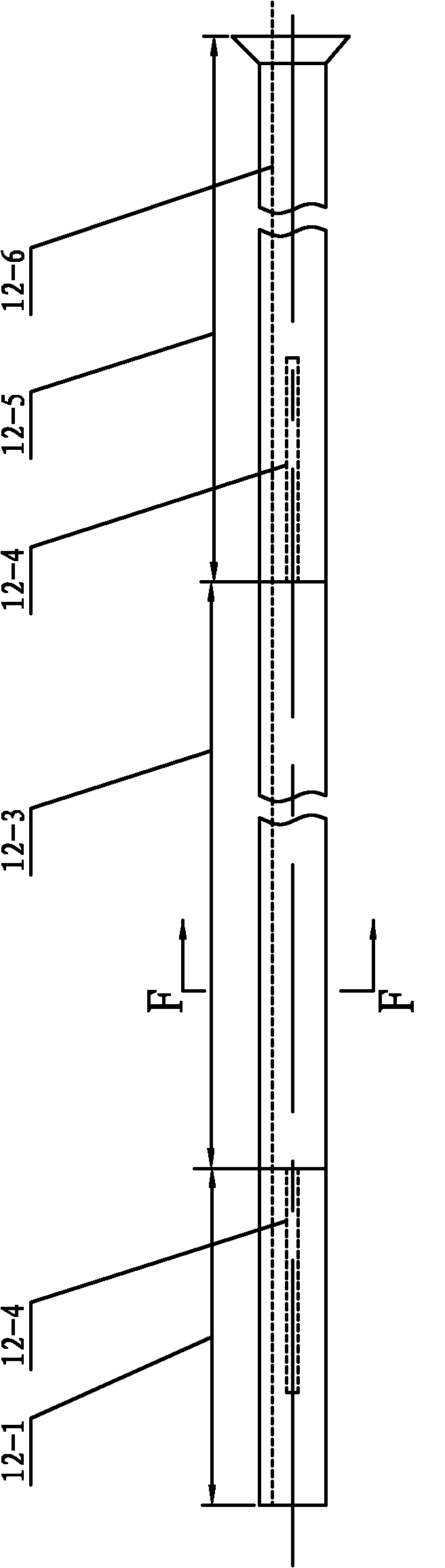
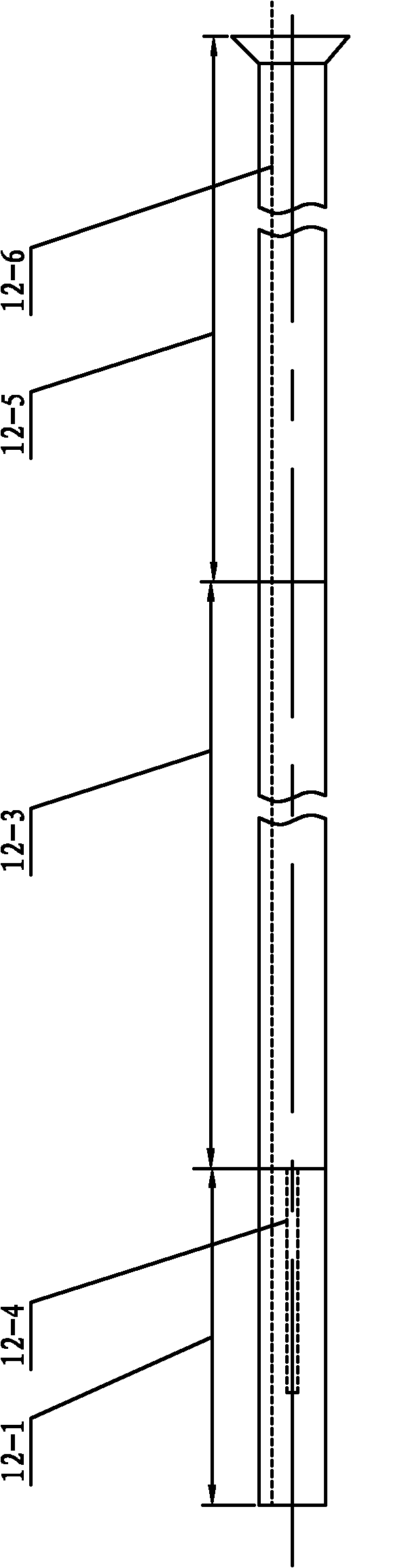
[0010] Specific implementation mode three: combination Figure 1 ~ Figure 4 and Figure 6 Note that the controllable catheter 12 in this embodiment includes a catheter head section 12-1, a bend controllable section 12-3, a sheath section 12-5, a pull wire 12-6, and one or two pose sensors 12-4 Catheter head section 12-1, bending controllable section 12-3 and sheath tube section 12-5 are affixed together successively to form a coaxial cavity pipe, and the front end of catheter head section 12-1 is a closed end (catheter head The section 12-1 and the sheath section 12-5 have relatively strong bending rigidity, the bending controllable section 12-3 has a smaller bending stiffness than the first two sections), and the rear end of the sheath section 12-5 is open end, the hollow tube is provided with a traction steel wire 12-6, one end of the traction steel wire 12-6 is fixedly connected to the front end of the catheter head section 12-1, and the other end of the traction steel wir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com