Walking robot positioning system based on monocular cam
A walking robot, monocular camera technology, applied in navigation calculation tools, road network navigators, etc., can solve the problems of complex map structure and large amount of calculation, and achieve the effects of accelerating convergence, improving positioning efficiency, and reducing particle degradation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
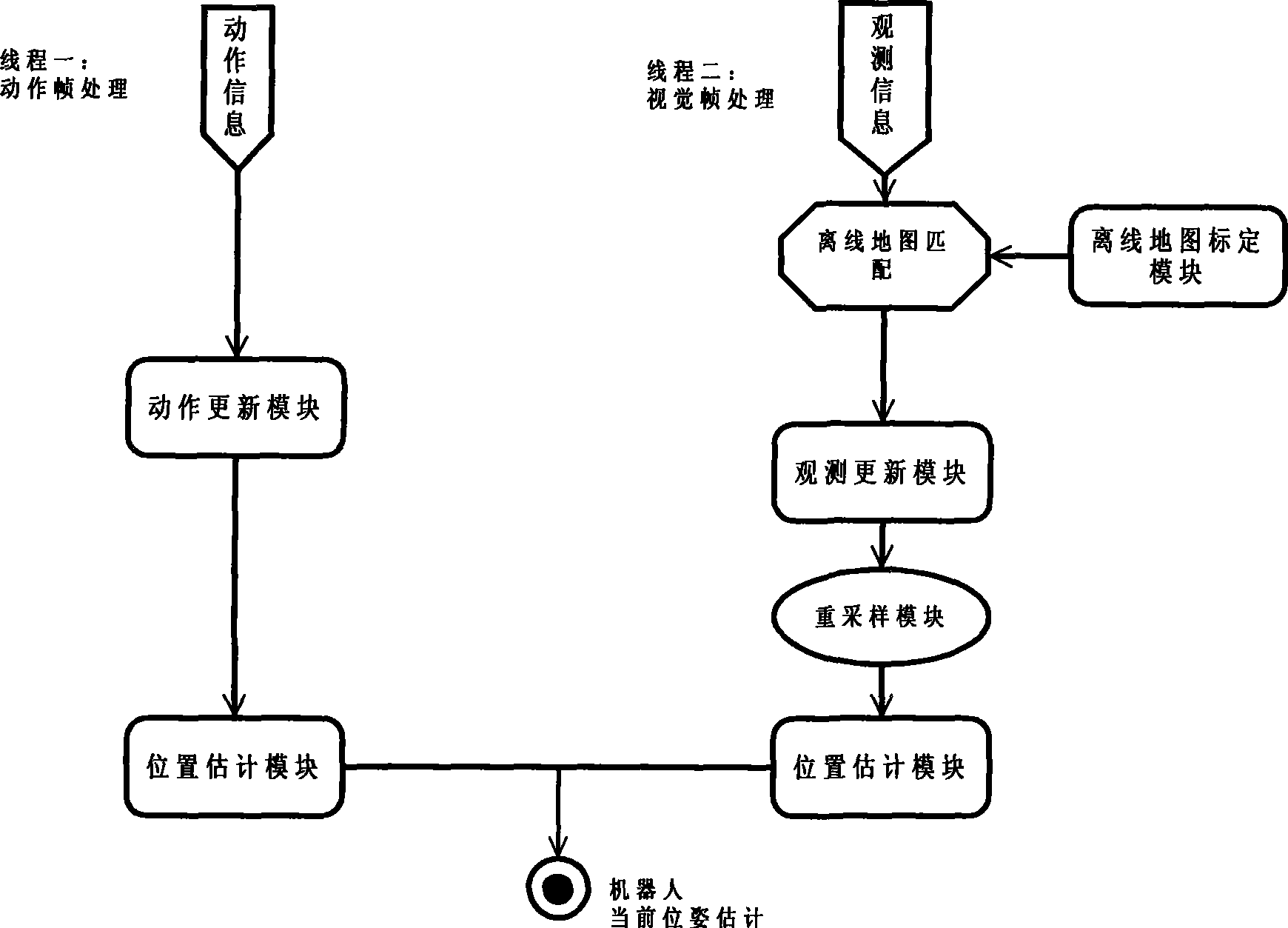
[0047] 1. System structure
[0048] see figure 1 System structure block diagram of the present invention. The robot's action frame frequency is 8ms / frame, and the visual frame frequency is 30ms / frame. Since the two frequencies are different, the system is divided into two threads for separate processing: the input of the action frame processing thread is the action increment detected per unit time, The thread consists of an action update module and a position estimation module, with independent result output. The visual frame processing thread includes map matching, visual update module, resampling module, and position estimation module, which mainly updates the weight and distribution of sample points through the recognition of environmental objects.
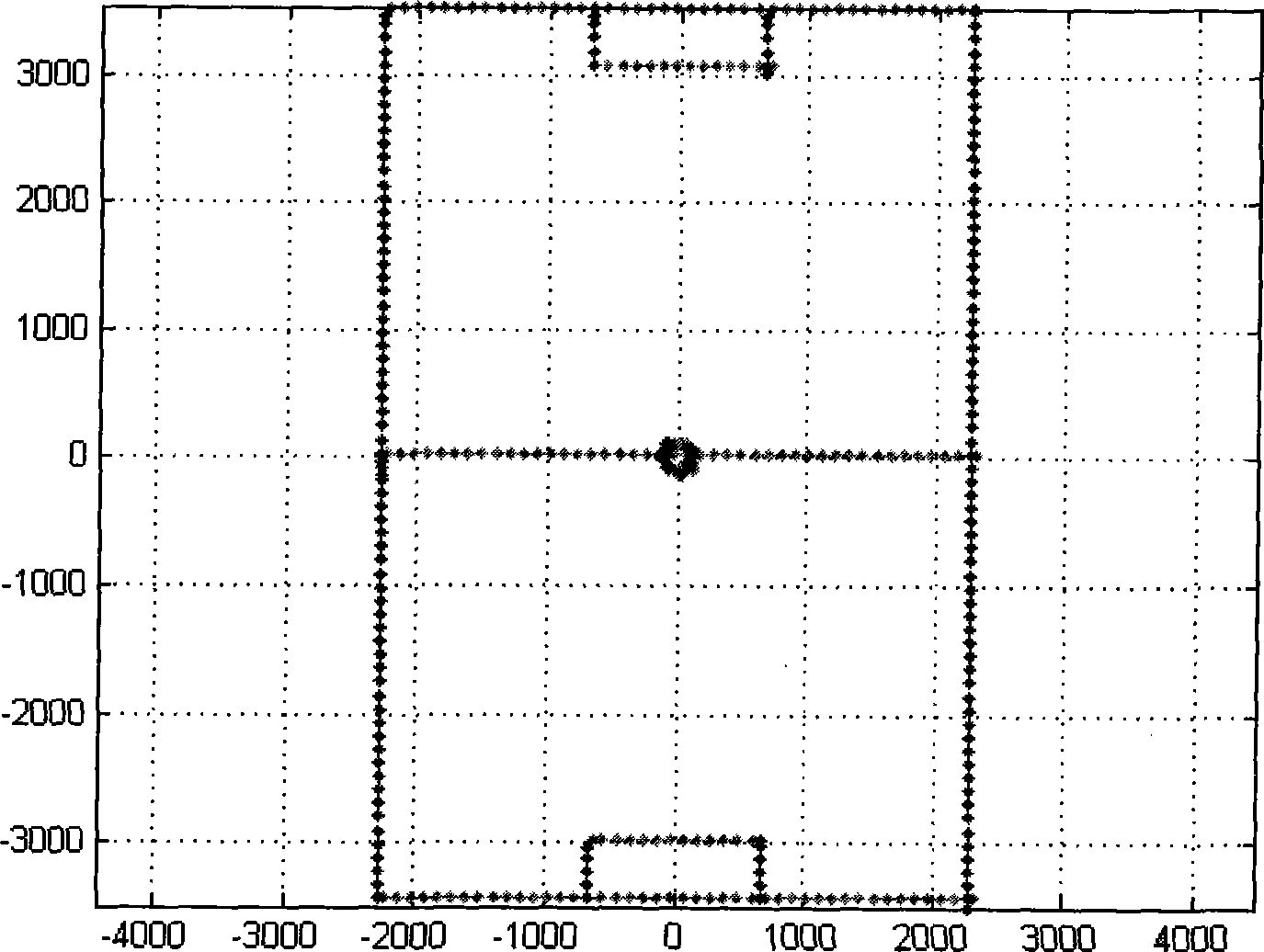
[0049] 2. Map creation
[0050] see Figure 2-Figure 4 , taking a 5m×7m indoor football...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com