Image guided surgery trackers using multiple asynchronous sensors
a technology of asynchronous sensors and surgery trackers, applied in the field of image guided surgery trackers using multiple asynchronous sensors, can solve the problems of inability to design a successful system, inability to detect the presence of the target, and inability to provide accurate measurements of the position of the target, so as to improve the accuracy of the tracking system, accurately define the location of the tool tip, and correct the tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
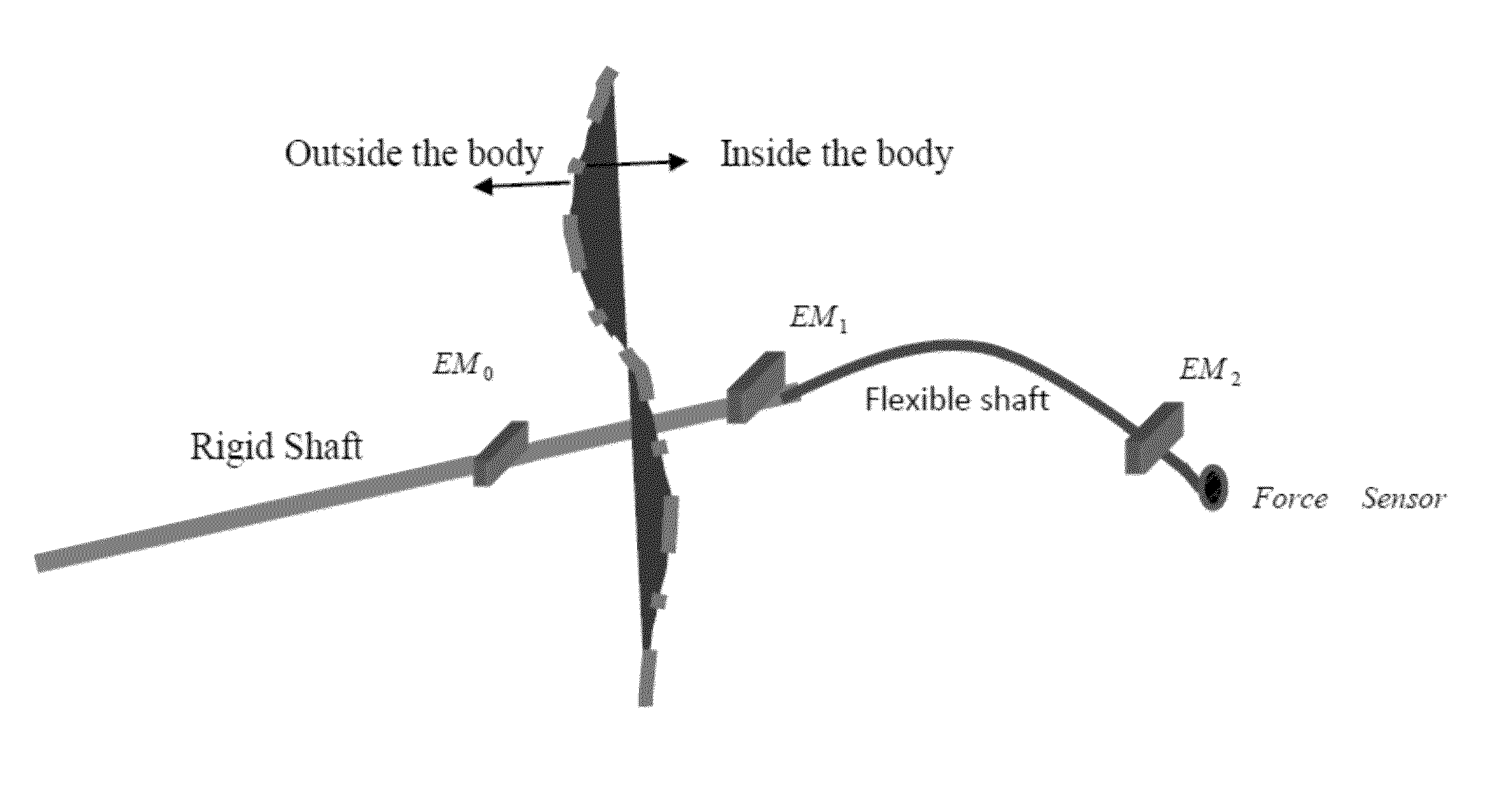
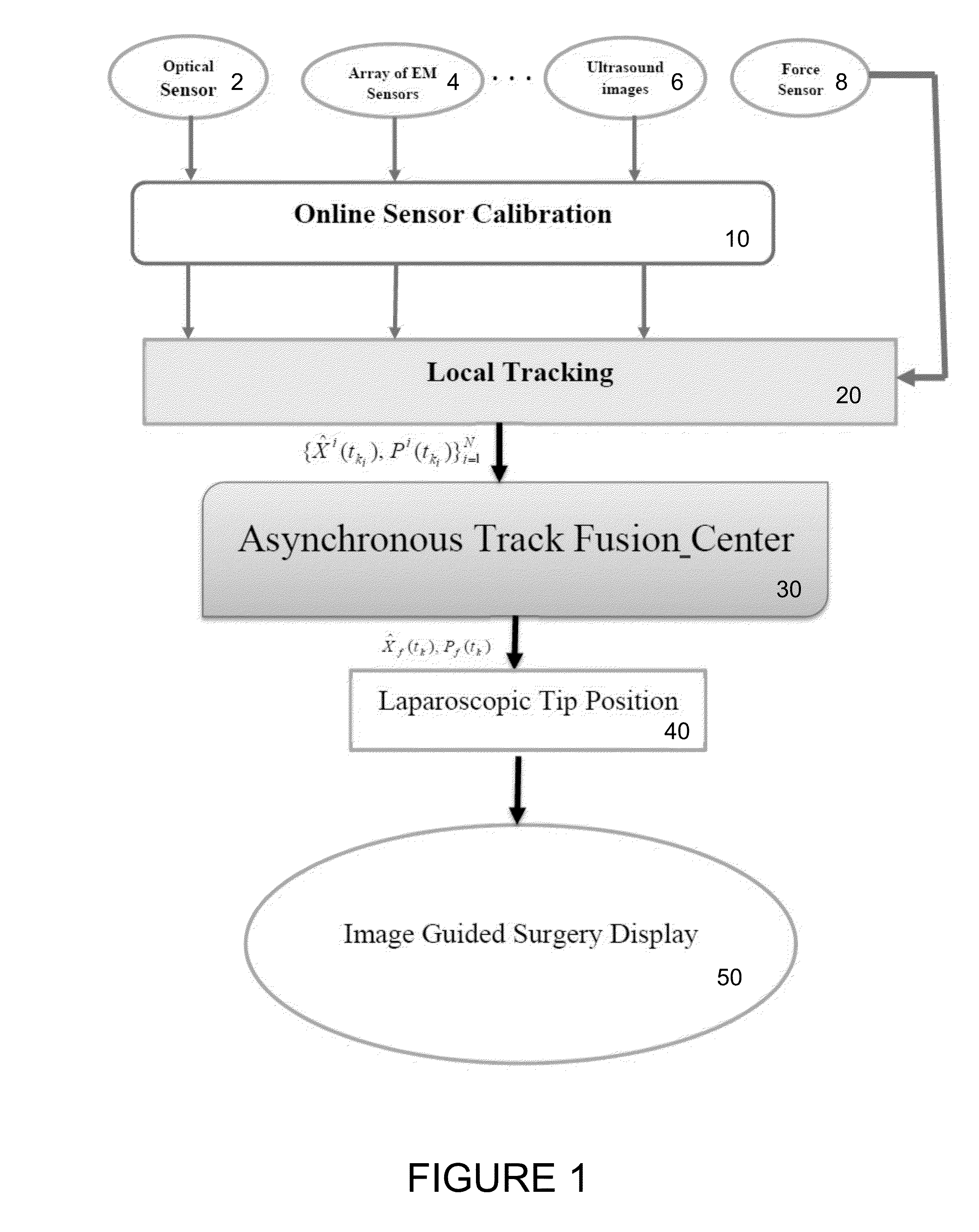
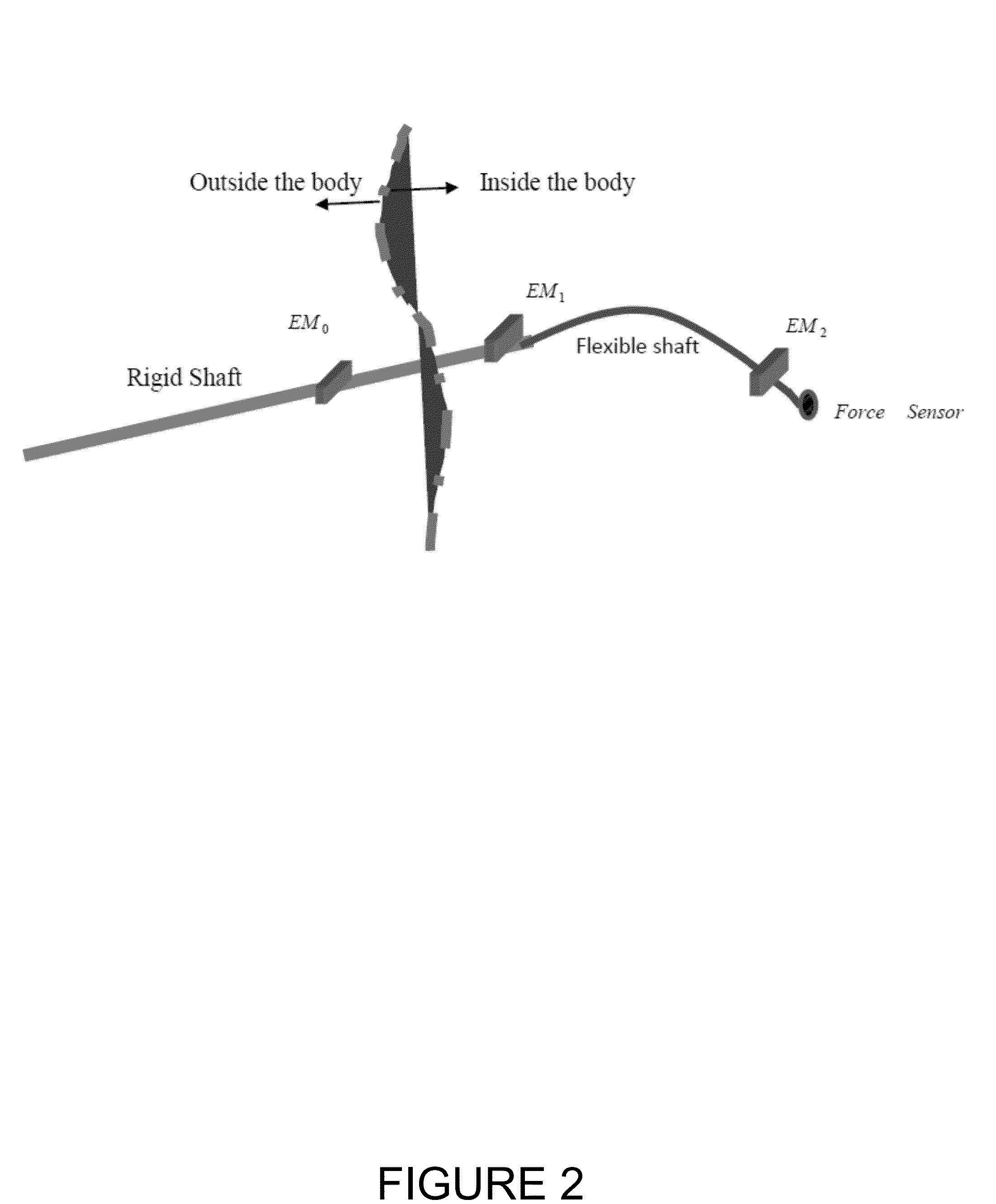
[0017]In various exemplary embodiments, the methods of the present invention treat the tip of a minimally invasive surgical instrument as a moving target inside the body, and is tracked in real time using an array of heterogeneous sensors, such as, but not limited to, optical, electromagnetic (EM), and sonar. The tracking of the minimally invasive instrument tip is accomplished without a priori knowledge about the target trajectory and target dynamics.
[0018]To increase the accuracy of the tracking system, more than one sensor may be used. Long range sensors, for example, can be used to detect the presence of a potential target in a region or space, but may not provide accurate measurements of the position of the target. Short range sensors can provide that accurate position information, but are not able to detect the presence of the target while it is far away. The use of both long range and short range sensors can lead to the design of a successful system that is not possible when ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com