Control method, device and system for robot applications
A control device and control system technology, applied in the general control system, control/adjustment system, recording and playback system, etc., can solve the problems of expensive maintenance, lengthy engineering and programming, interrupted production damage, etc., to achieve simplified programming and production time saving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
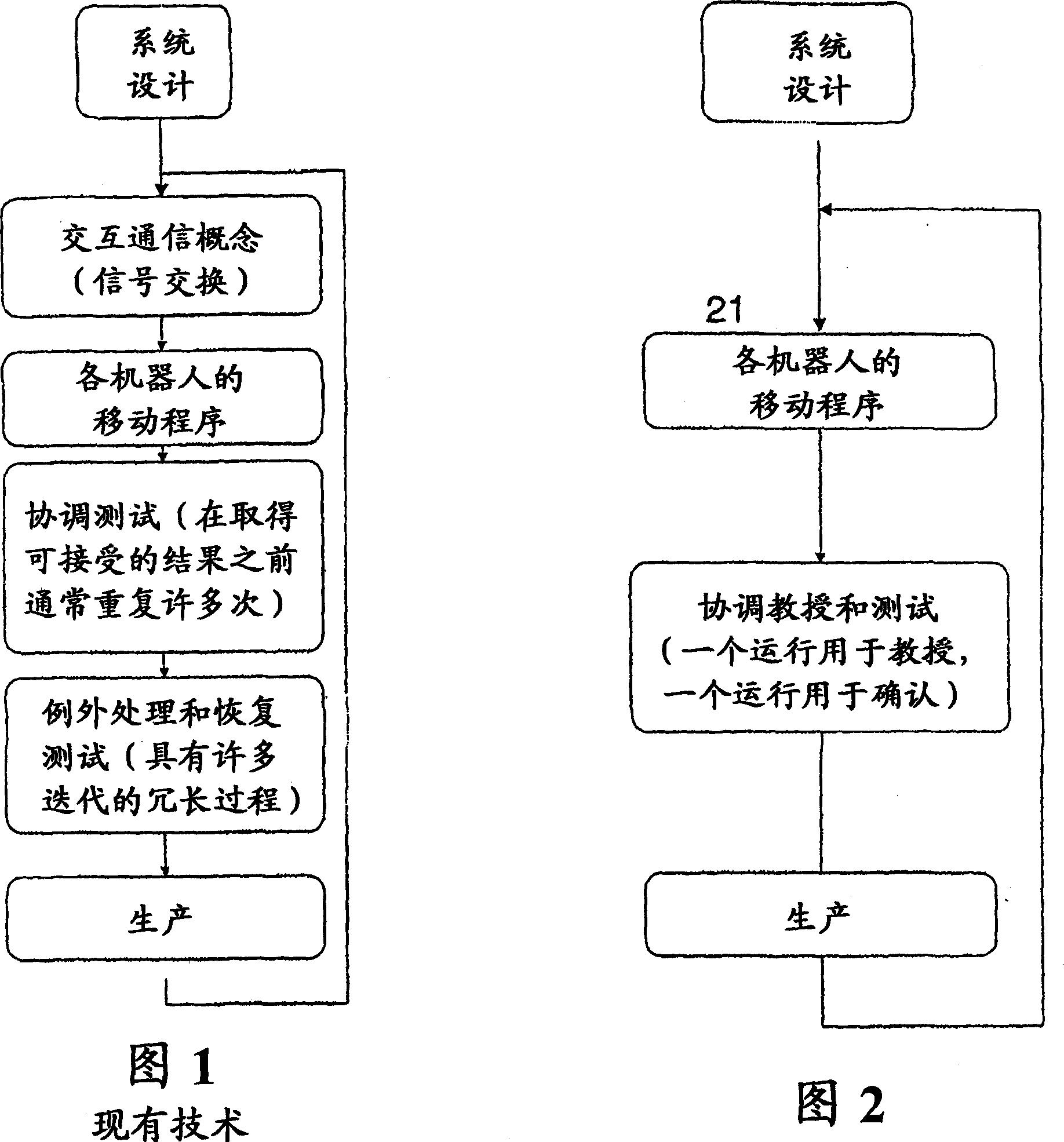
[0027] Figure 1 (Prior Art) shows a method of teaching a task to one or more robots according to known methods. To establish a new or changed job, a series of the first 4 of the following 5 stages or steps are repeated until a satisfactory production result is achieved. These steps are:
[0028] - design of the communication concept between the robot and the controller,
[0029] - developing a movement program for each robot and teaching said program to each robot,
[0030] - Coordinate testing, move adjustments, repeat testing until satisfied,
[0031] - exception handling routine, test recovery routine, repeat until satisfied,
[0032]- Start production.
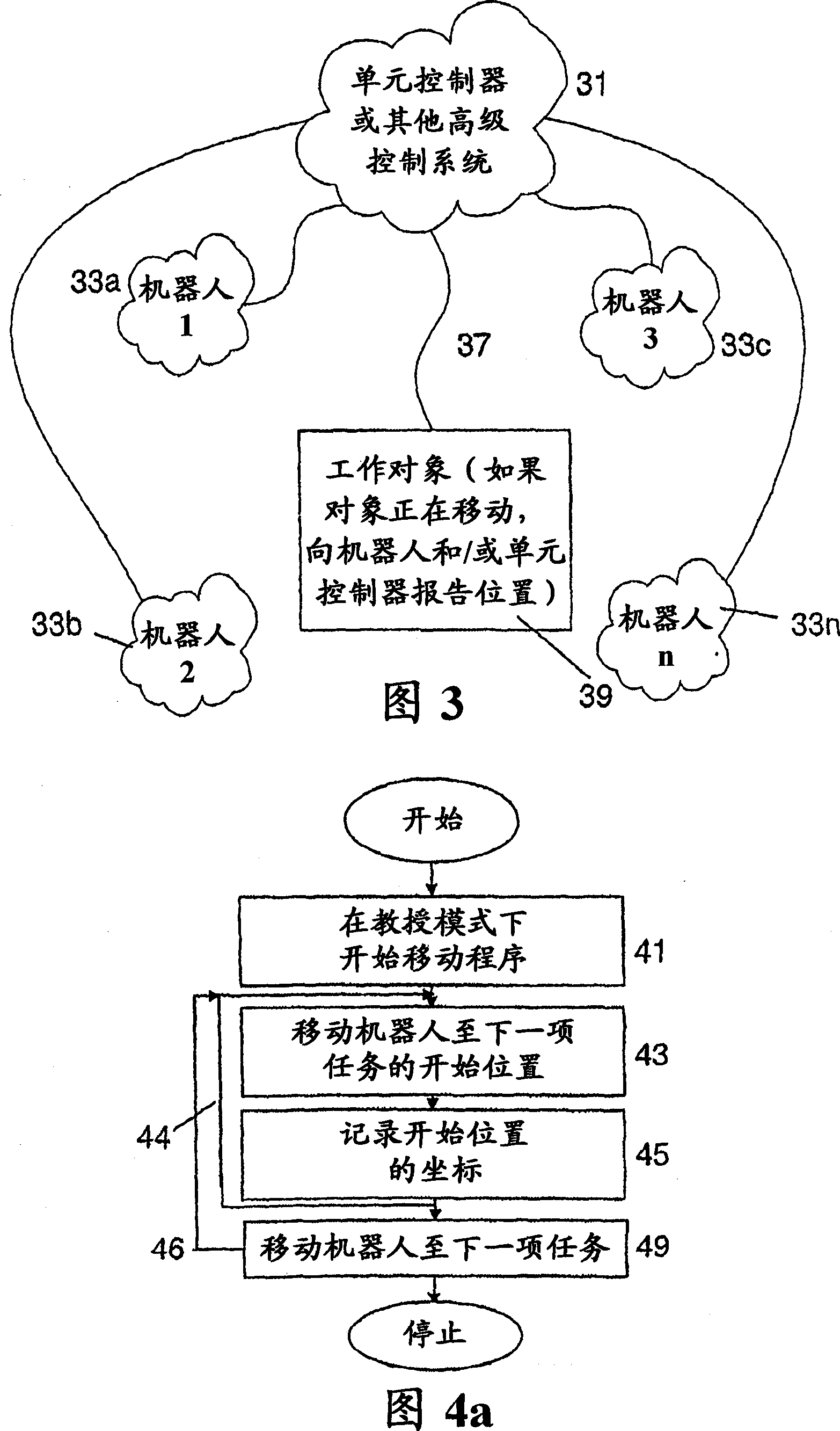
[0033] figure 2 A method for teaching a task to one or more robots according to an embodiment of the invention for controlling one or more robots is summarized. It is immediately apparent how quickly pre-production changes and installations can be made by utilizing this method. The schematic diagram shows that the u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com