Robot tactile sense reproduction method based on water jet stimulation and apparatus therefor
A tactile reproduction, water jet technology, applied in instruments, manipulators, computer control and other directions, can solve the problems of hindering the normal movement of fingers, complex structure, low energy conversion efficiency of vibration and tactile feedback, etc., to avoid difficulties in time adaptation, gentle and comfortable Clear and true tactile sensation, realizing the effect of pressure-temperature fusion tactile reproduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
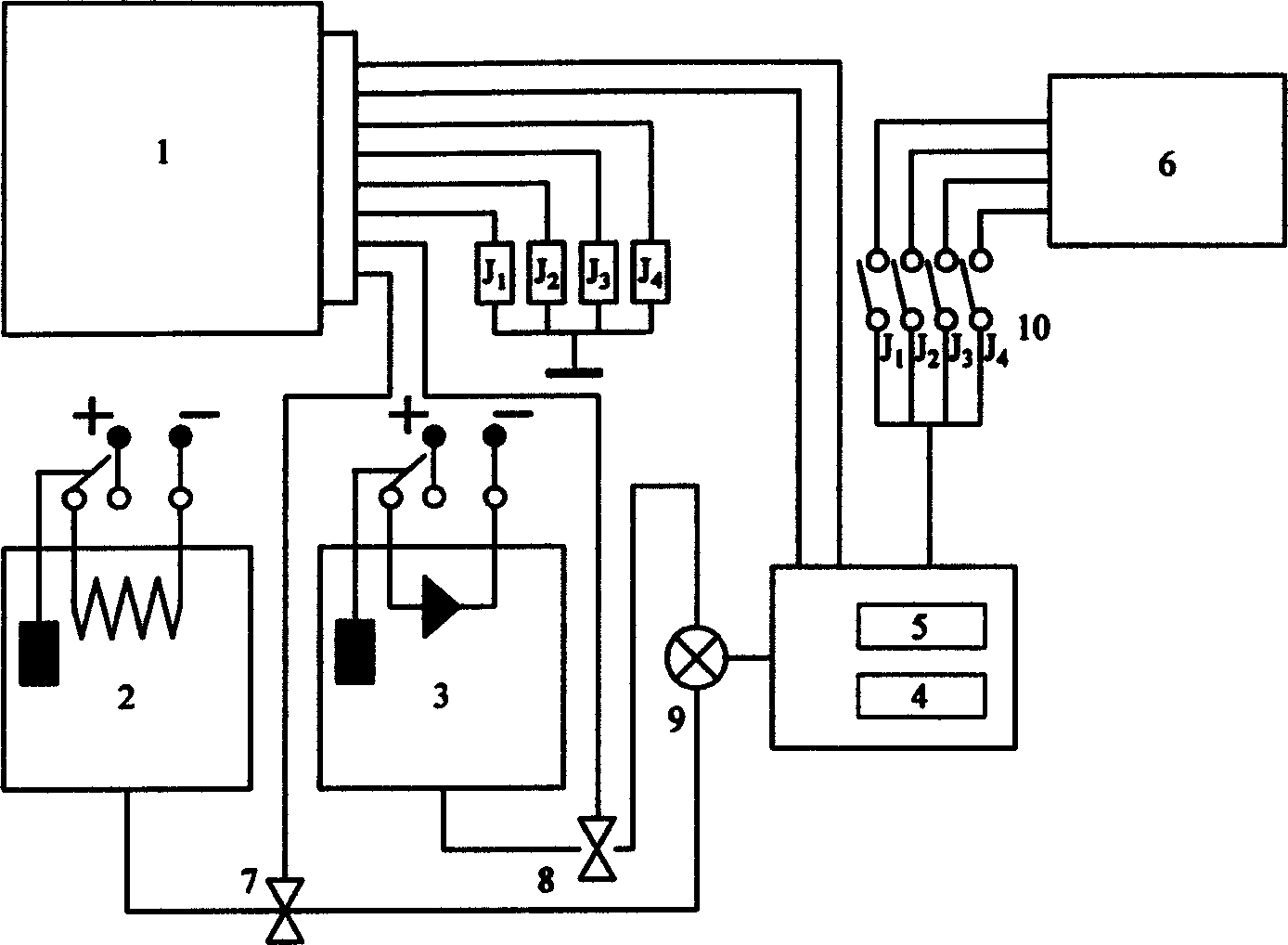
[0025] figure 1 It is a schematic diagram of the principle of the water jet tactile stimulator provided by the present invention. Structurally, the water jet robot tactile reproduction stimulation device consists of a computer 1, a hot water pool 2, a cold water pool 3, a supercharger 4, a low-frequency vibrator 5, a tactile pool 6, a regulating valve 7, a regulating valve 8, a water mixer 9 and an electromagnetic Valve group 10 etc. are made up. The input of the local computer 1 comes from the tactile information of the remote robot, and after the information is processed, the gate of the electromagnetic valve group is controlled through the output port of the computer (such as a parallel port, etc.), thereby forming a local artificial water system that matches the remote tactile information. Jet Haptics. At the same time, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com