Unmanned ship intelligent target detection method and system adopting binocular camera
A target detection and binocular camera technology, applied in file system, file system management, computer components, etc., can solve problems such as large weight file of SSD algorithm, complex lightweight network structure, and slow network operation speed, so as to facilitate training and upgrades, easy deployment and implementation, and fast detection of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0063] According to an unmanned boat intelligent target detection method using a binocular camera provided by the present invention, the method includes the following steps:
[0064] Step S1: Create a system directory according to the Pascal VOC format.
[0065] Step S2: Download or take a selfie on the network to create the graphics of the obstacles, and process them into color pictures and place them in the JPEGImages directory; the obstacles are ships, buoys, reefs and other common obstacles; the color pictures are 416×416.
[0066] Step S3: Use BBOX or similar software to annotate the picture, and place the generated txt file and xml file in the labels directory and the Annotations directory of the system directory, respectively.
[0067] Step S4: randomly generate the training set train.txt file, the test set test.txt file and the validation set val.txt file according to the ratio of 7:2:1, and place them in the Main directory under ImageSets in the system directory.
[...
Embodiment 2
[0084] Embodiment 2 is a preferred example of Embodiment 1, in order to describe the present invention in more detail.
[0085] The present invention also provides an unmanned boat intelligent target detection system using a binocular camera, and the system includes the following modules:
[0086] Module M1: Create a system catalog in the Pascal VOC format.
[0087] Module M2: Download or take a selfie on the Internet to build the graphics of obstacles, and process them into color pictures, which are placed in the JPEGImages directory; obstacles are ships, buoys, reefs and other common obstacles; color pictures are 416×416.
[0088] Module M3: Use BBOX or similar software to annotate pictures, and place the generated txt file and xml file in the labels directory and the Annotations directory of the system directory, respectively.
[0089] Module M4: randomly generate training set train.txt file, test set test.txt file and validation set val.txt file according to the ratio of ...
Embodiment 3
[0106] Embodiment 3 is a preferred example of Embodiment 1, in order to describe the present invention in more detail.
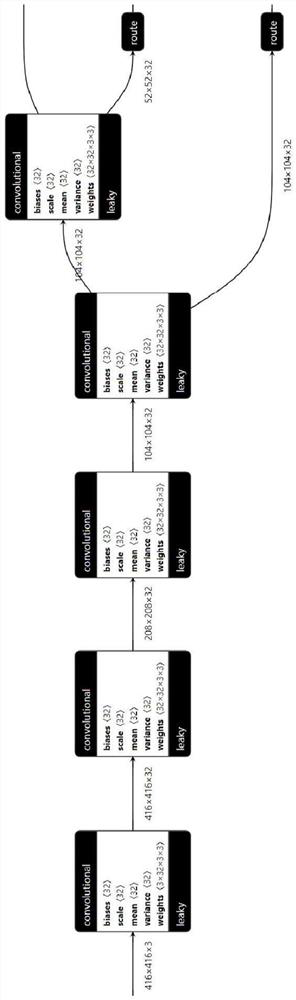
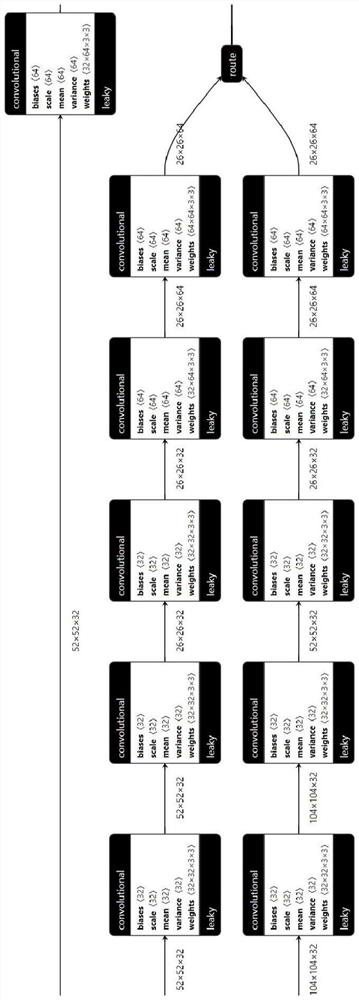
[0107] Aiming at the shortcomings of the prior art, the present invention provides an intelligent target detection system for an unmanned boat using a binocular camera and a Parnet lightweight network, and improves the Parnet network originally used for the object classification function into a target detection network. It is implemented as an object detection network on the Darknet deep learning framework. After training, images captured by the binocular camera can be used to detect boats, buoys, reefs, and other common obstacles in real time, along with their relative positions and sizes.
[0108] The present invention is realized by the following technical solutions, and the present invention includes: the described unmanned boat intelligent target detection system using binocular camera and Parnet lightweight network, the core of which is binocular camer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com