


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Monocular vision inertia SLAM (Simultaneous Localization and Mapping) method and system based on adaptive robust kernel
An adaptive, robust, monocular vision technology, applied in the field of visual robots, can solve the problems of frame-by-frame accumulation of optimization errors, large error drift, and difficulty in long-term stable operation of visual SLAM, so as to improve system accuracy and reduce accumulated errors. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments.
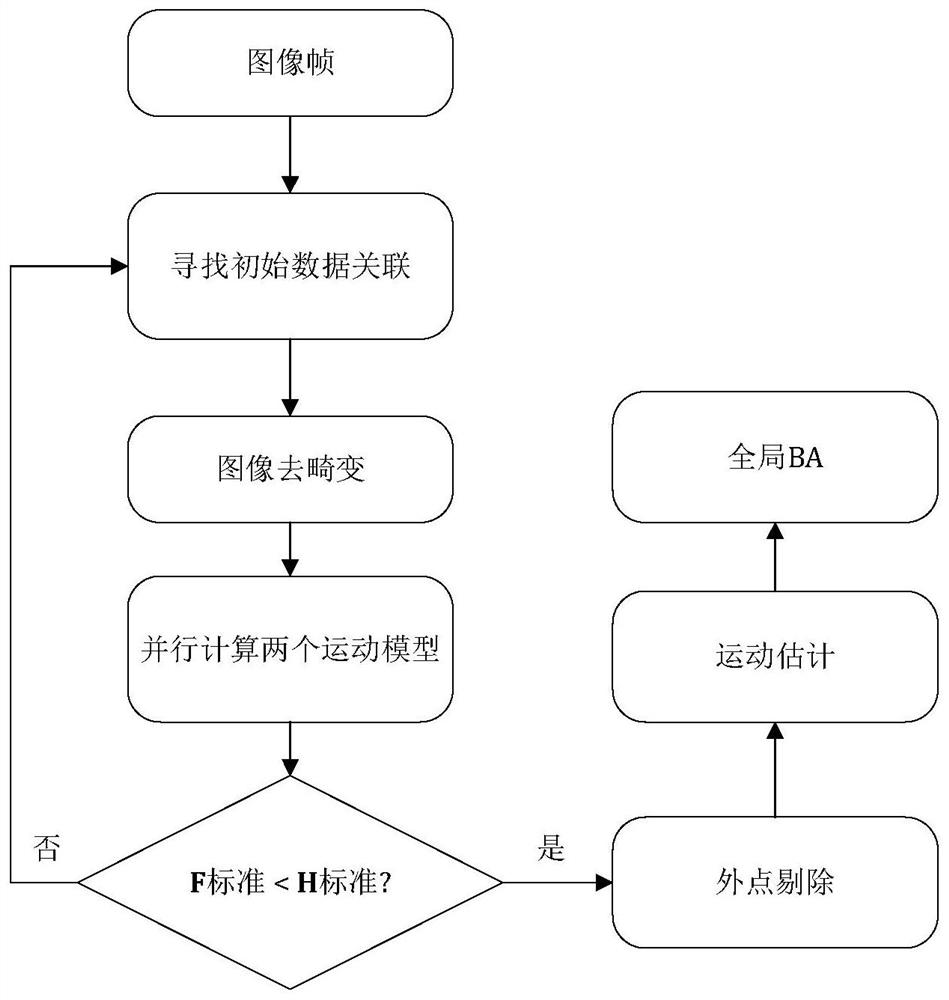
[0036] like figure 1As shown, an adaptive robust kernel-based monocular visual-inertial SLAM method provided by the embodiment of the present invention first extracts feature points in the image frame to perform feature matching, searches for initial data association, and then performs de-distortion processing on the image ( Only consider the radial distortion), calculate the homography matrix model and the basic matrix model in parallel, select the motion model according to the geometric information content, then perform outlier elimination and decomposition on the selected motion model to obtain the initial motion estimation, and finally perform global BA optimization Initial rebuild. The embodiments of the present invention mainly involve (1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com