Flame positioning alarm system and method based on converter station valve hall fire-fighting robot
A fire-fighting robot and alarm system technology, applied in the field of flame positioning, can solve problems such as poor performance, and achieve the effects of improving detection speed, improving detection accuracy, and reducing false alarm rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
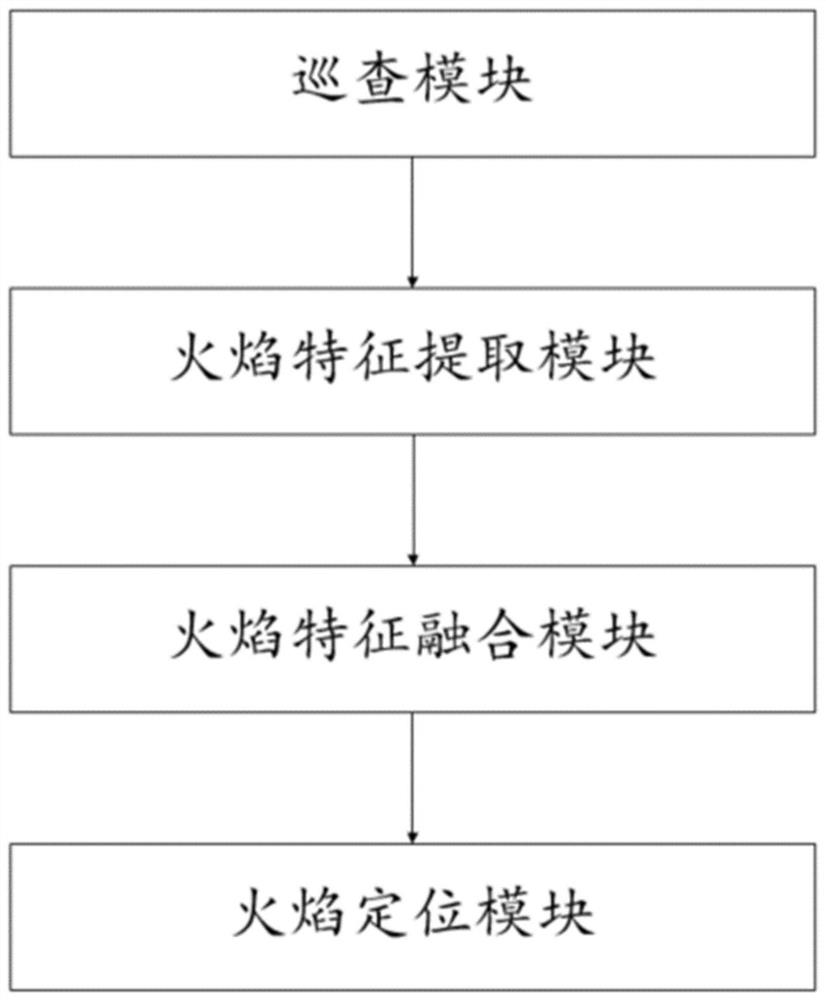
[0082] This embodiment provides a flame location alarm system based on a converter station valve hall fire-fighting robot, such as figure 1 shown, including:
[0083] Inspection module: used to collect real-time scene images of converter station valve halls through fire-fighting robots installed in converter station valve halls; and to identify suspicious fire scene images;
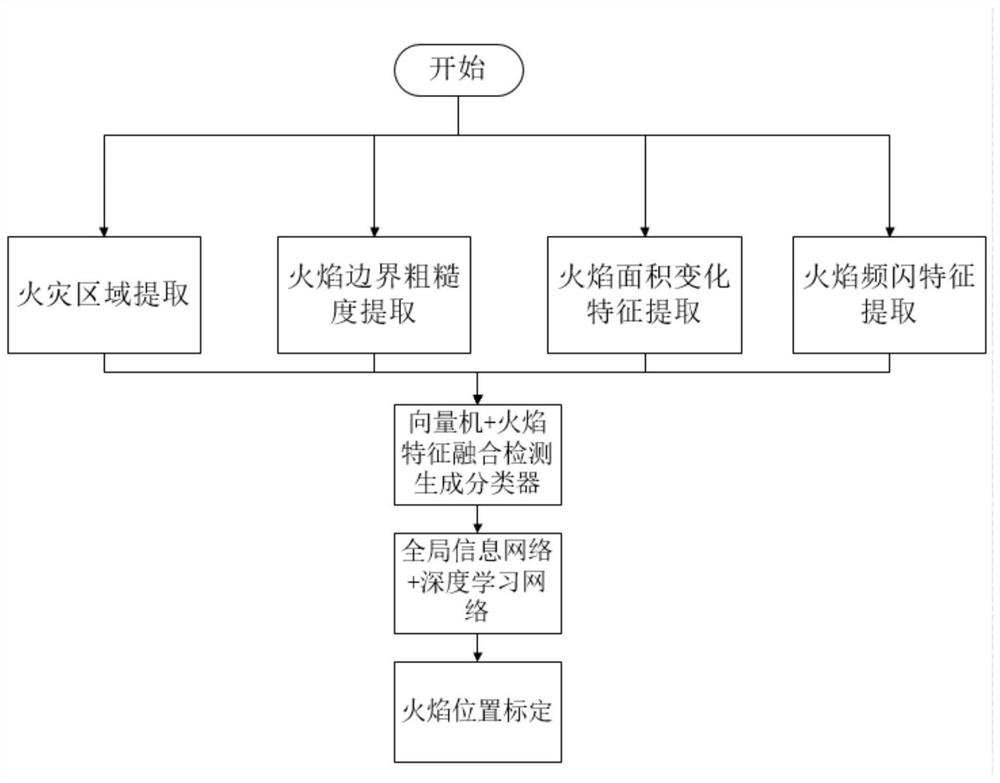
[0084] Flame feature extraction module: used to extract flame features from suspicious fire scene images;
[0085] Flame feature fusion module: It is used to fuse the flame features extracted from each suspicious fire scene image, and input the fused flame features into the preset support vector machine. Featured scene images and scene images without flame features;
[0086] Flame location module: It is used to process the classified images through the Faster R-CNN model combined with the global information network to determine the flame location.
[0087] In this embodiment, the flame is mainly identi...
Embodiment 2
[0098] On the basis of the flame location alarm system based on the converter station valve hall fire fighting robot provided in Embodiment 1, preferably, the inspection module includes:
[0099] Inspection point unit: used to set the inspection point of the fire-fighting robot through the three-dimensional map of the valve hall of the converter station; wherein, the inspection point is used to determine the background image of the real-time scene image, and each inspection of the same fire-fighting robot The background image of the point is the same;
[0100] Inspection unit: used to conduct real-time inspection of the inspection points and obtain real-time scene images;
[0101] Inspection task unit: used to set the inspection tasks of each inspection point; the inspection task is to set some inspection tasks for each fire robot according to the inspection points, and specify the inspection rules. For each inspection point Set a certain number of inspections and inspection ...
Embodiment 3
[0106] On the basis of the flame location alarm system based on the converter station valve hall fire fighting robot provided in Embodiment 2, preferably, the inspection task unit determines whether a suspicious fire area occurs in the inspection task based on the frame difference method, including:
[0107] According to the inspection task, determine the real-time scene image of each inspection point;
[0108] Perform frame-by-frame processing on the real-time scene image to obtain frame images;
[0109] According to the frame image, determine the fixed element in the background image and the low-change element whose change state is below the preset target threshold; wherein,
[0110] The change state is the change degree of the posture of the element in the background image in a plurality of different frame images;
[0111] The preset target threshold is an element posture change threshold in the background image;
[0112] Deleting the fixed element and the low-change elem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com