Spraying disinfection robot and spraying disinfection method
A robot and spray device technology, applied in disinfection, manipulators, atomized substances, etc., can solve the problems of limited killing scenarios, inability to kill specific objects accurately, and affecting disinfection and sterilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0059] Please refer to figure 1 , is a schematic structural diagram of a spraying and disinfecting robot provided by an embodiment of the present invention, which mainly includes: a mobile chassis 1, a spraying device 2 and a target disinfecting device 3; wherein, the functions of each device are as follows:
[0060] The mobile chassis 1 is used to control the movement of the spraying and disinfecting robot.
[0061] As a preferred solution, the mobile chassis 1 specifically includes: a wireless network module, an environment perception device, a motion detection device, a main controller and a drive device; wherein, the functions of each device are as follows:
[0062] The wireless network module is used to provide wireless network for the spraying and disinfecting robot. Among them, different wireless network modules can be selected according to the actual situation. At present, most of them use 4G wireless routers. In order to pursue faster network speed and lower latency,...
Embodiment 2
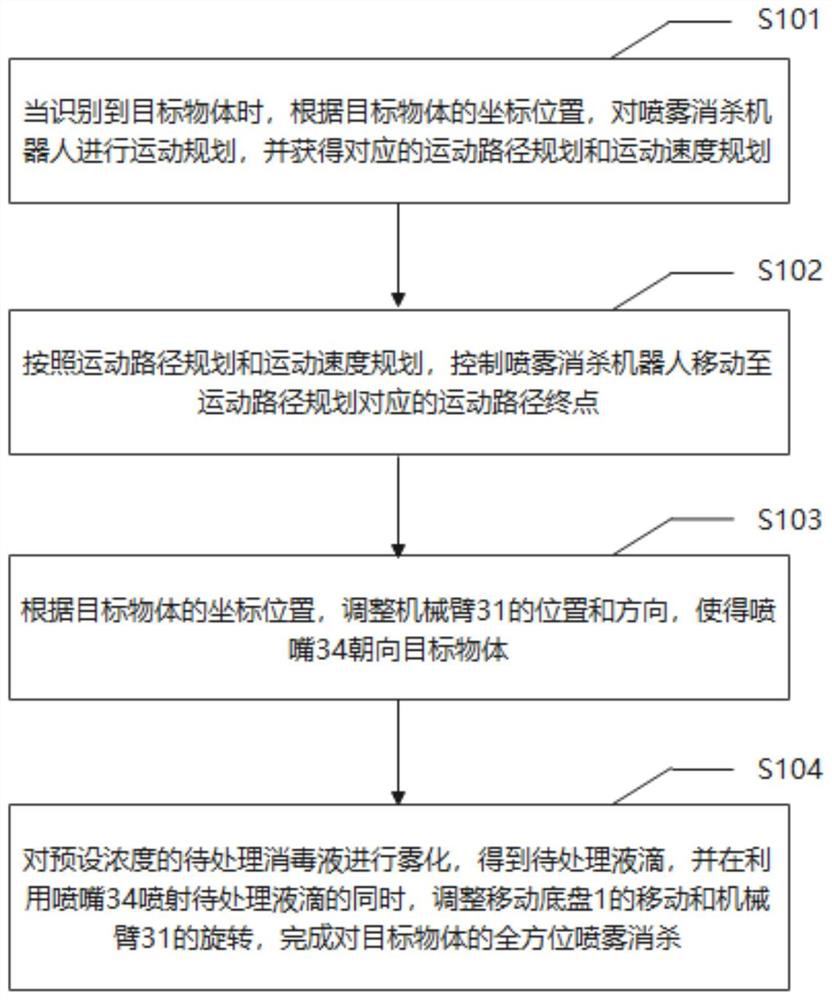
[0090] Please refer to figure 2 , figure 2 A schematic flowchart of a spraying and disinfecting method provided in an embodiment of the present invention, the method includes steps S101 to S104, and each step is as follows:
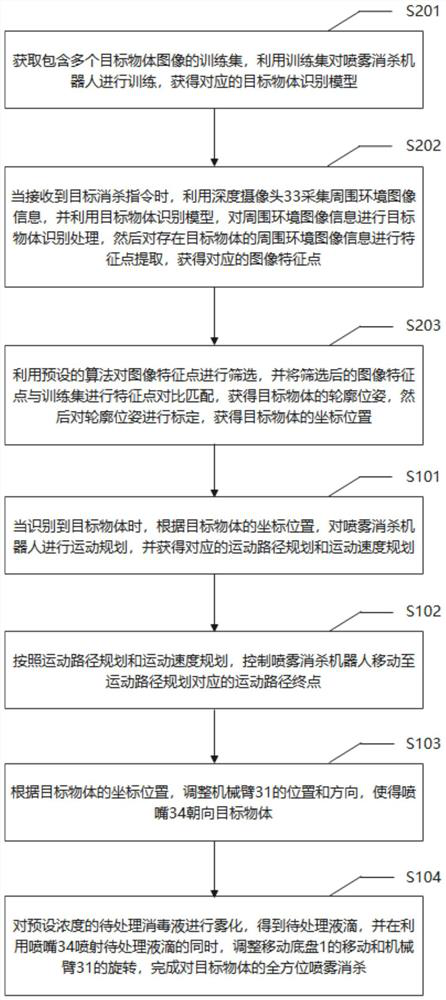
[0091] Step S101 , when the target object is identified, according to the coordinate position of the target object, perform motion planning for the spraying and disinfecting robot, and obtain the corresponding motion path planning and motion speed planning.
[0092] Step S102, according to the motion path planning and motion speed planning, control the spraying and disinfecting robot to move to the end point of the motion path corresponding to the motion path planning.
[0093] Step S103 , according to the coordinate position of the target object, adjust the position and direction of the mechanical arm 31 so that the nozzle 34 faces the target object.
[0094] Step S104, atomize the disinfectant to be treated with a preset concentration to obtain drop...
Embodiment 3
[0097] As a preferred solution of the second embodiment, please refer to image 3 , before step S101, it also includes the target position acquisition process, which specifically includes steps S201 to S203, and each step is as follows:
[0098] Step S201 , acquiring a training set including multiple target object images, and using the training set to train the spray-disinfecting robot to obtain a corresponding target object recognition model.
[0099] Step S202, when the target disinfecting instruction is received, the depth camera 33 is used to collect the image information of the surrounding environment, and the target object recognition model is used to perform target object recognition processing on the surrounding environment image information, and then the surrounding environment image information of the target object exists. Perform feature point extraction to obtain corresponding image feature points.
[0100] Step S203, using a preset algorithm to screen the image fe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com