Vehicle positioning method based on reconfigurable intelligent surface
A vehicle positioning and intelligent technology, applied in the field of signal processing, can solve problems such as failure, high demand for wireless sensor networks and antenna arrays, and inability to accurately reflect target position information, so as to improve positioning performance and reduce demand
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
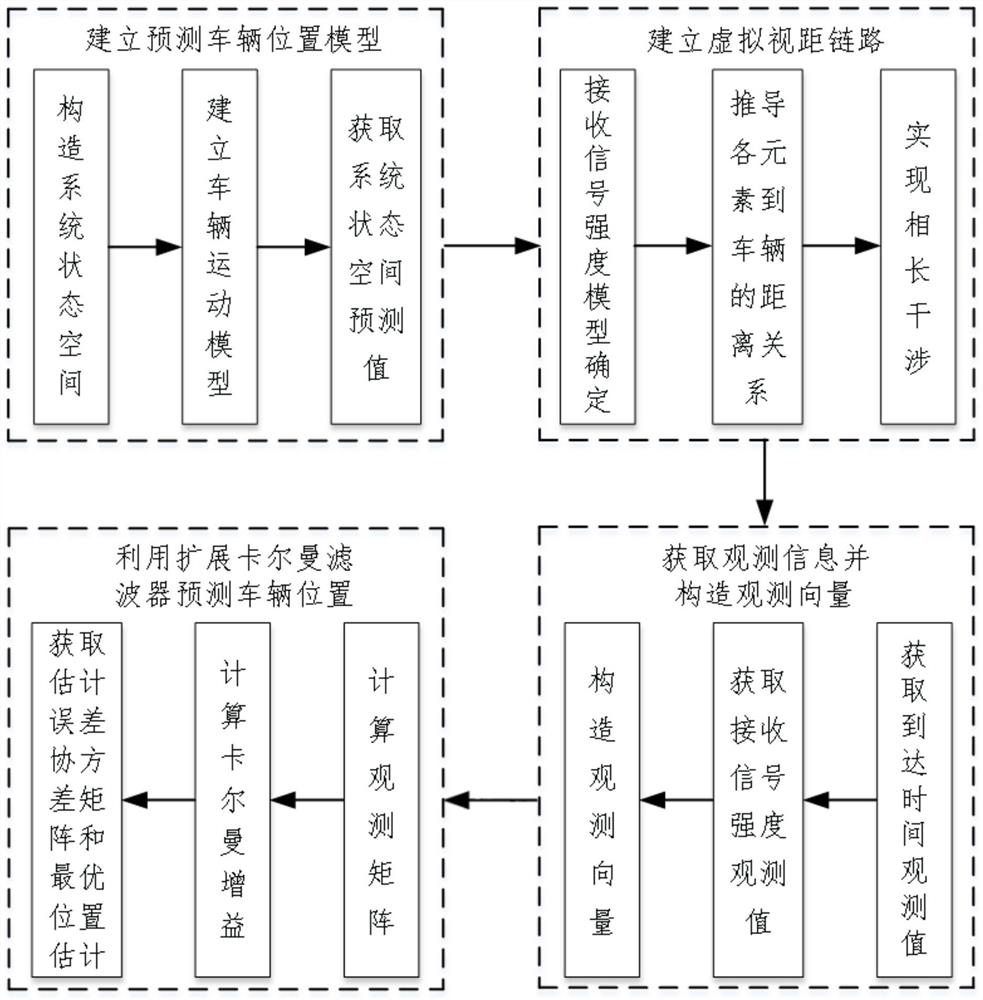
[0017] Specific implementation mode 1: The specific process of a vehicle positioning method based on reconfigurable smart surface in this implementation mode is as follows:
[0018] Step 1. Establishing a predicted vehicle position model;
[0019] Step 2, establishing a virtual line-of-sight link;
[0020] Step 3. Obtain observation information and construct observation vectors based on Step 1 and Step 2;
[0021] Step 4: Based on Step 1, Step 2, and Step 3, use the Extended Kalman Filter to predict the vehicle position.
specific Embodiment approach 2
[0022] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in the step 1, a predicted vehicle position model is established, and the steps are as follows:
[0023] Step 11. Construct a state vector x containing vehicle position and speed information k , x k =[p x,k ,v x,k ,p y,k ,v y,k ] T ;
[0024] where p x,k and p y,k Indicates the coordinate position of the vehicle in the x-axis direction and y-axis direction in the two-dimensional Cartesian coordinate system at time k, v x,k and v y,k Respectively represent p x,k and p y,k The corresponding speed, superscript T means transpose; x k Indicates the state vector of the vehicle at time k;
[0025] Step 12. Assume that the vehicle is approximately a constant speed model at any two adjacent moments, satisfying x k =Fx k-1 +Gω;
[0026] where F represents the state transition matrix, Δt represents the sampling interval; ω is the Gaussian noise whose mean value is zero...
specific Embodiment approach 3
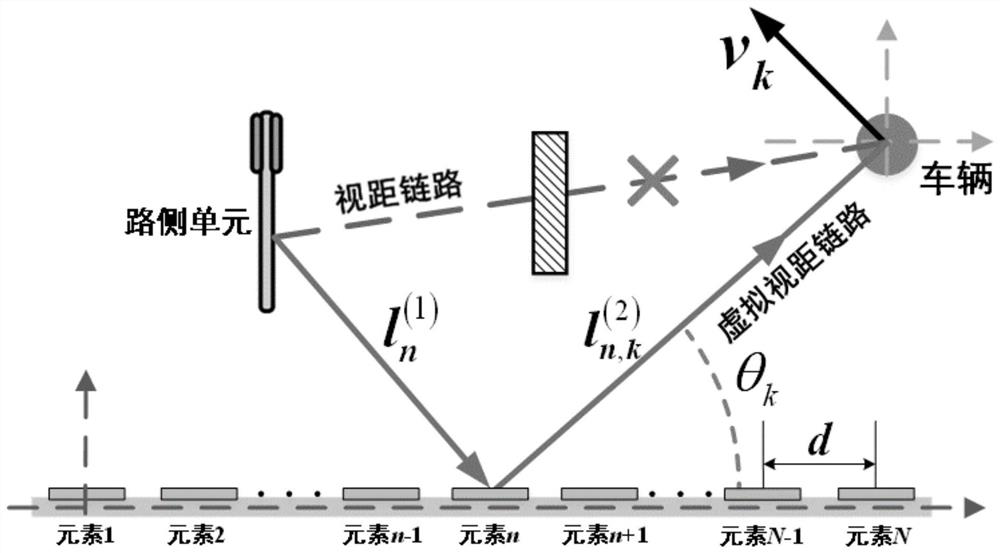
[0031] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that in the step two, a virtual line-of-sight link is established, and the steps are as follows:
[0032] Step 21. For complex scenes lacking line-of-sight links, use the reconfigurable smart surface technology to establish a virtual line-of-sight link between the vehicle and the roadside unit, refer to the path loss model based on propagation loss and shadow effect, and the signal at time k passes through The virtual line-of-sight link established by the reconfigurable smart surface propagates to the vehicle, and the signal strength received by the vehicle is
[0033]
[0034] where s(Γ k ) represents the real value of the received signal strength of the vehicle, the subscript n represents the nth element among the N elements of the reconfigurable smart surface, 1≤n≤N, the whole system is based on the first element, and δ and λ are emission signal power and wavel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com