


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Non-contact multi-target positioning method
A multi-target positioning and non-contact technology, which is applied in the field of non-contact multi-target positioning, can solve the problems of a large amount of time, the influence of positioning accuracy, and large positioning errors, etc., to achieve enhanced extraction capabilities, solve insufficient accuracy, and enrich positioning methods Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
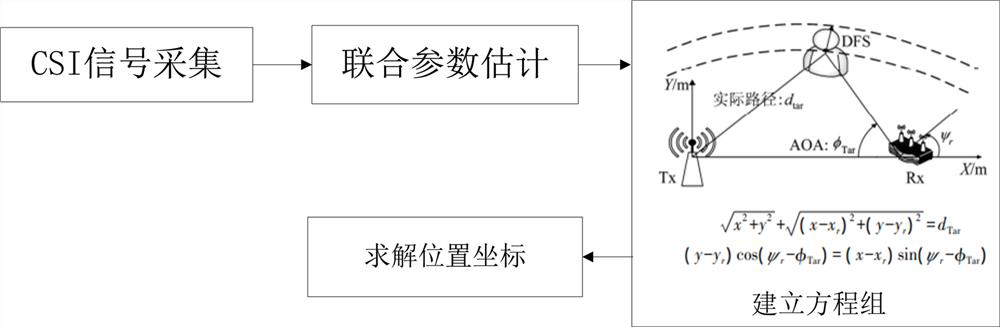
[0047] Such as image 3As shown, this embodiment provides a non-contact multi-target positioning method, including parameter estimation processing, CBR module processing and classifier module processing.
[0048] Parameter estimation processing
[0049] Including the step of mathematical modeling, the step of constructing the spatial spectrum function, the step of solving the peak-to-peak value of the spectrum and the step of generating the heat map; considering the high-resolution advantages of the JADE-MUSIC algorithm, this algorithm is used for parameter estimation;
[0050] The parameter estimation process includes:
[0051] Mathematical modeling steps: take the MA root antenna as the signal receiving array, the distance between the antenna arrays is d, and the receiving signal is continuously sampled at the rate of 1 / T during the signal collection, T is the sampling period; the spatial and temporal The sample numbers are respectively MA and MT=[Twin / T];
[0052] Use ma...
Embodiment 2
[0083] This embodiment provides a terminal, including a memory, a processor, and a computer program stored in the memory and capable of running on the processor. When the processor executes the computer program, the non- The steps of the contact multi-target positioning method are to obtain the result of multi-target behavior recognition.
[0084] It should be noted that, for the convenience and brevity of description, for the specific working process of the terminal, reference may be made to the corresponding process of the method described in the above-mentioned embodiment 1, which will not be repeated here.
[0085] It should be noted that the terminal in this embodiment may be a terminal device such as a PC, a mobile phone, or a tablet.
[0086] In particular, the terminal can be used as a care terminal. At present, our country has entered an aging society. Due to the limitation of medical resources, home care for the elderly has become very important, and its related re...
Embodiment 3
[0088] This embodiment provides a computer-readable storage medium, on which computer instructions are stored. When the computer instructions are executed by a processor, the steps of the above-mentioned non-contact multi-target positioning method are implemented, and the result of multi-target behavior recognition is obtained. .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com