Sensing and driving integrated rigid-flexible coupling finger and flexible robot dexterous hand
A rigid-flexible coupling and finger technology, which is applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of low precision and stability of joint bending motion, low operational reliability, and cumbersome installation, etc., to achieve safer human-computer interaction Sexuality, simplification of the grip control method, and the effect of easy grip control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
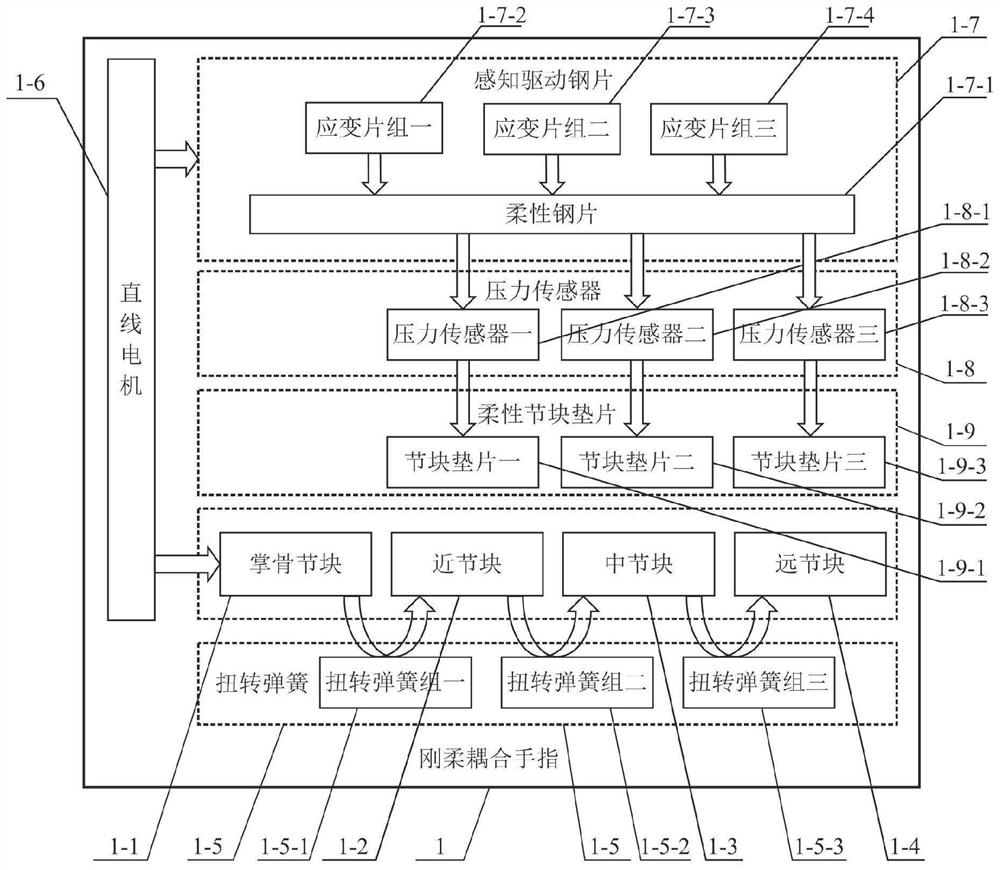
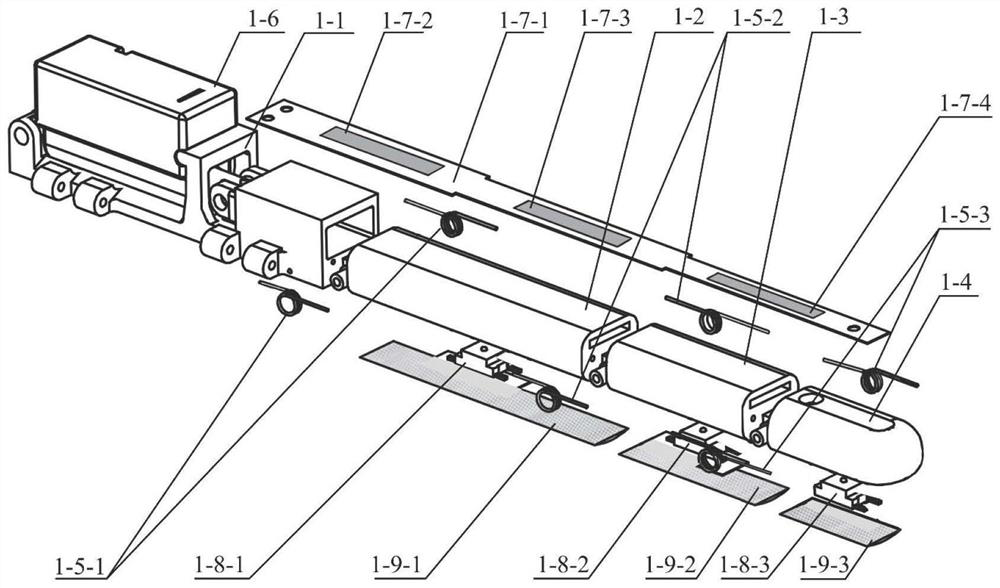
[0036] Refer to attached figure 1 , attached figure 2 , attached image 3 , attached Figure 4 And attached Figure 5 , the present invention discloses a perception-driven integrated rigid-flexible coupling finger and a compliant robotic dexterous hand. The rigid-flexible coupling finger 1 includes a metacarpal segment 1-1, a proximal segment 1-2, and a middle segment 1- 3. Distal segments 1-4, torsion springs 1-5, linear motors 1-6, sensing drive steel sheets 1-7, pressure sensors 1-8, flexible segment gaskets 1-9; the metacarpal segments 1-1, the proximal segment 1-2, the middle segment 1-3 and the distal segment 1-4 are sequentially connected in series by rotating joints; the metacarpal segment 1-1, the proximal segment 1-2, the middle segment The block 1-3 and the distal block 1-4 are all provided with grooved holes; the torsion spring...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com