Modeling and control method for visual servo system of omni-directional mobile robot
An omnidirectional mobile, robot vision technology, applied in the modeling and control field of omnidirectional mobile robot visual servo system, can solve the problems of not being able to handle constraints well, not meeting visual visibility constraints and actuator constraints, etc. To achieve the effect of good handling and good constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
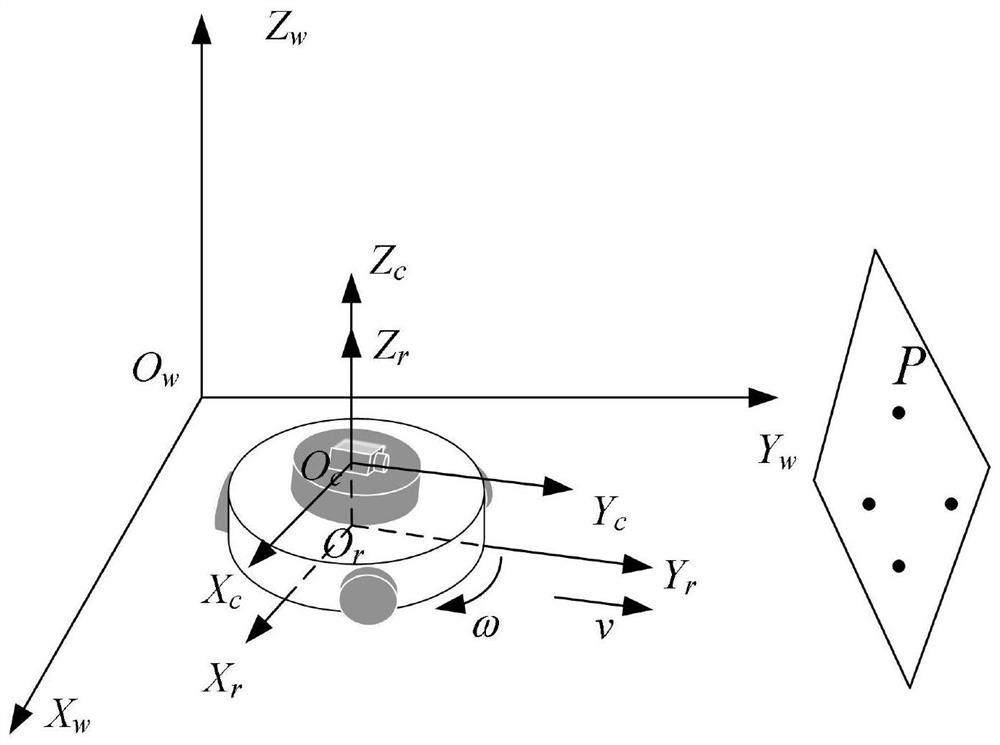
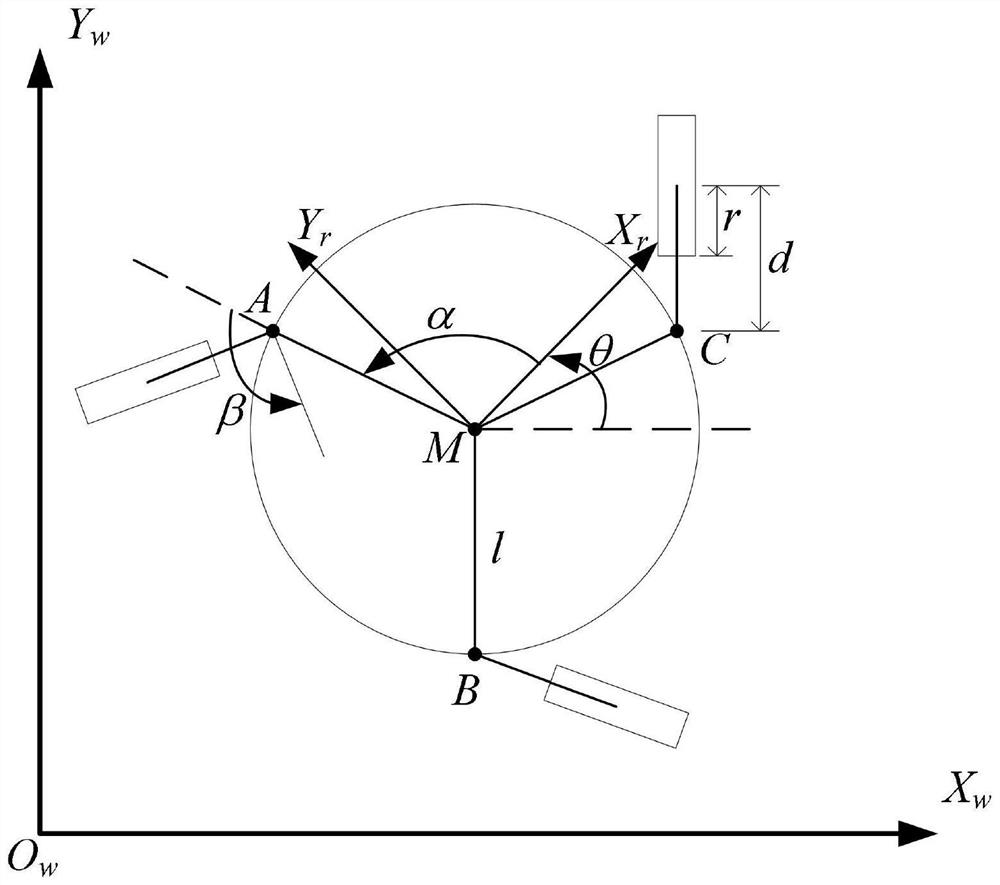
[0115] 1) Object selection. The radius of the eccentric wheel of the selected omnidirectional mobile robot is r=0.1m, the distance from the center of the vertical axis of the eccentric wheel to point M is l=0.8m, and the eccentric distance d of the eccentric wheel is 0.2m. Robot coordinate system X r The angles from the axis to the straight lines MA, MB, and MC are α 1 = π / 3, α 2 = π, α 3 =-π / 3. Select the focal length of the camera f=6mm, the image resolution is 640×480pixels, and the height z from the origin of the camera coordinate system to the feature point P c = 0.4m.
[0116] 2) The communication is established. The PC side is controlled by MATLAB. The controller selects STM32 single-chip microcomputer, the model is STM32F103RCT6. The PC and the single-chip microcomputer realize serial communication, and the single-chip microcomputer and the driver realize CAN communication. Establish communication and use MATLAB to send speed and other commands to control the init...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com