Aircraft track self-adaptive planning method, device and equipment and storage medium
An aircraft, self-adaptive technology, applied in the direction of instruments, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problems of long working time, low efficiency and long cycle time of aircraft, and reduce turning The effect of staying and waiting time and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
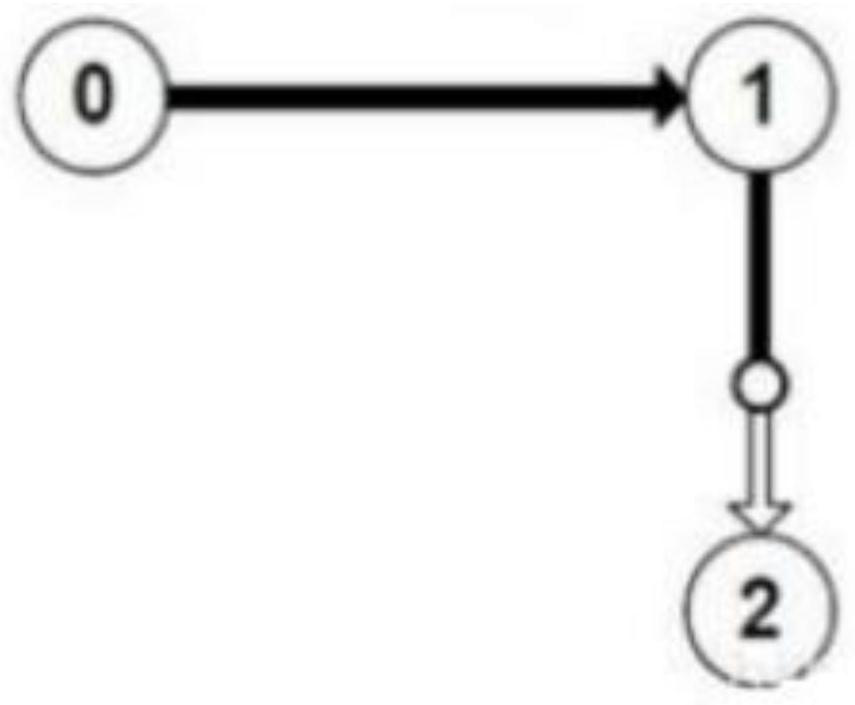
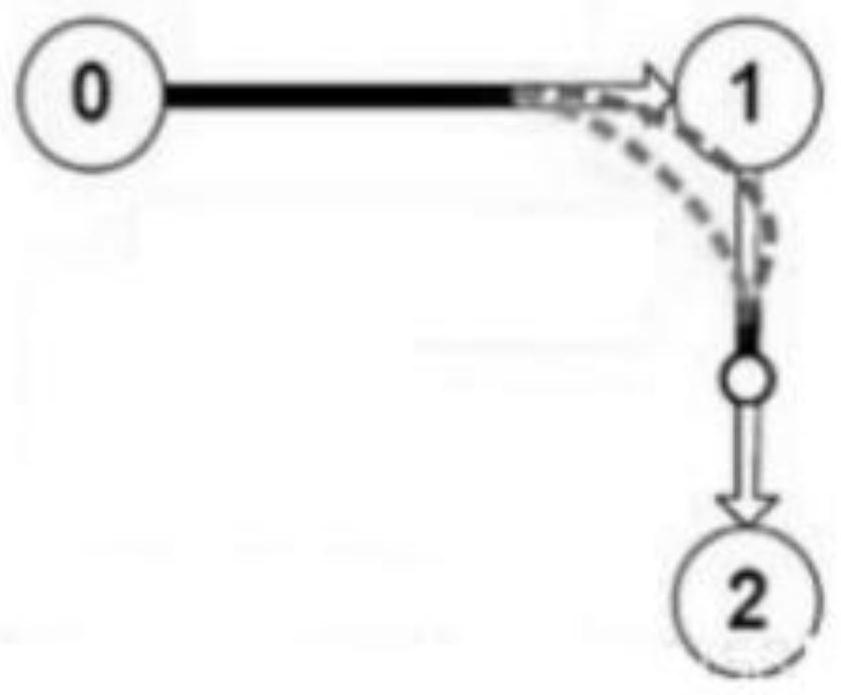
[0049] Such as figure 1 As shown, when the aircraft performs some tasks such as route inspection, plane surveying and mapping, and 3D modeling, it needs to navigate autonomously and guide the trajectory. Generally, track planning is carried out in the form of point-to-point. After arriving at the point, turn to the next point by fixed-point steering, and reciprocate to realize the entire trajectory planning process. After arriving at the point, a fixed-point turn or a waiting coordinated turn is required. E.g figure 1 From 0 o'clock to 1 o'clock to 2 o'clock in the form of point-to-point, after 1 o'clock, turn to 2 o'clock through a fixed point, this method is not very efficient, and there will be deceleration, pause and waiting after the point ,low efficiency. Based on the above defects, the present invention provides a method for adaptive track planning, such as figure 2 As shown, from 0 o'clock to 1 o'clock to 2 o'clock is the way of adaptive coordinated turning. In the...
Embodiment 2
[0065] Based on Embodiment 1 of the present invention, Embodiment 2 of the present invention also provides a device for adaptive planning of a track, including:
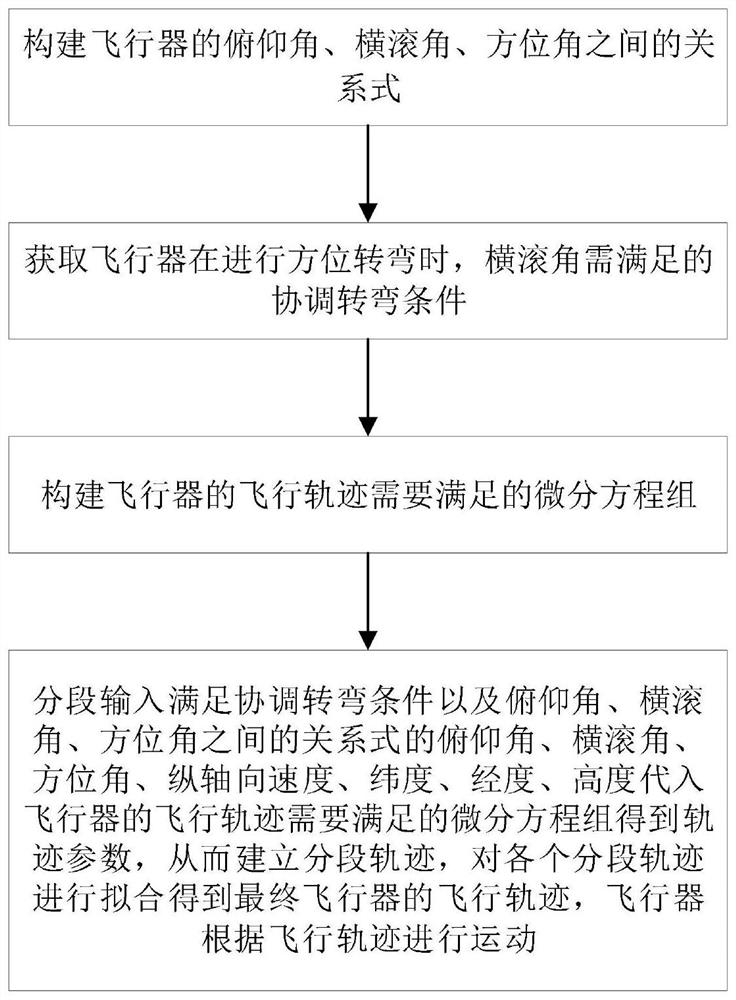
[0066] Relational model, used to construct the relationship between the pitch angle, roll angle and azimuth angle of the aircraft;
[0067] The coordinated turning condition acquisition module is used to acquire the coordinated turning condition that the roll angle needs to meet when the aircraft performs an azimuth turn;
[0068] The flight trajectory equation building block is used to construct the differential equations that the flight trajectory of the aircraft needs to satisfy;
[0069] The flight trajectory acquisition module is used to segmentally input the pitch angle, roll angle, azimuth angle, vertical axis speed, latitude, longitude, and altitude that meet the coordination turning conditions and the relationship between the pitch angle, roll angle, and azimuth angle Substituting the differential equations...
Embodiment 3
[0083] Based on Embodiment 1 of the present invention, Embodiment 3 of the present invention also provides an electronic processing device, including at least one processor and a storage device storing at least one execution program, when the at least one execution program is executed by the at least one processor Executing, the at least one processor implements the method as described above.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com