A 3D object perception method in vehicle edge scene
A 3D target and scene technology, applied in the field of 3D target perception, can solve the problems of poor generalization and easy loss of target information, and achieve the effects of long time-consuming solution, reduced point cloud processing time, and improved generalization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
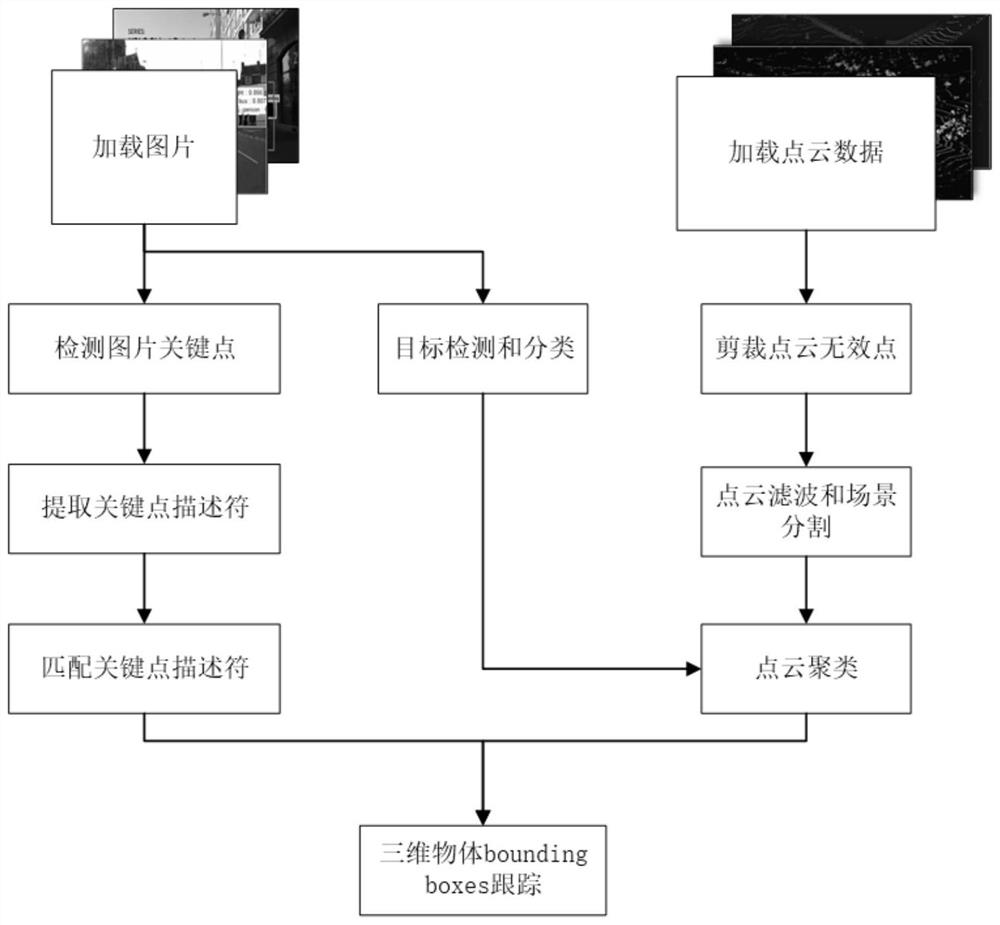
[0043]The invention provides a three-dimensional target perception method in a vehicle-mounted edge scene, which realizes the three-dimensional target perception and tracking under the vehicle-mounted system by utilizing point cloud projection and two-dimensional image fusion. Under the algorithm optimization of parallel computing, the method performs filtering and segmentation operations on the point cloud image data, then performs point cloud classification and feature value extraction, and then combines the two-dimensional image to project the point cloud onto the two-dimensional image for clustering, and finally The matching of information points and the connection of targets are combined with the relevant data of the previous and subsequent frames to achieve the effect of matching and tracking. The method also solves the problem of how to perform target recognition through the combination of lidar and camera return images and deploy it on a small terminal device. After the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com