A collaborative odor source localization method for multi-olfactory robots
A positioning method and robot technology, applied in two-dimensional position/channel control, instruments, motor vehicles, etc., can solve problems such as the inability to achieve iterative training results and motion path planning linkage perception, lack of multi-robot information sharing, etc. , to achieve the effect of improving flexibility and efficiency, and reducing consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
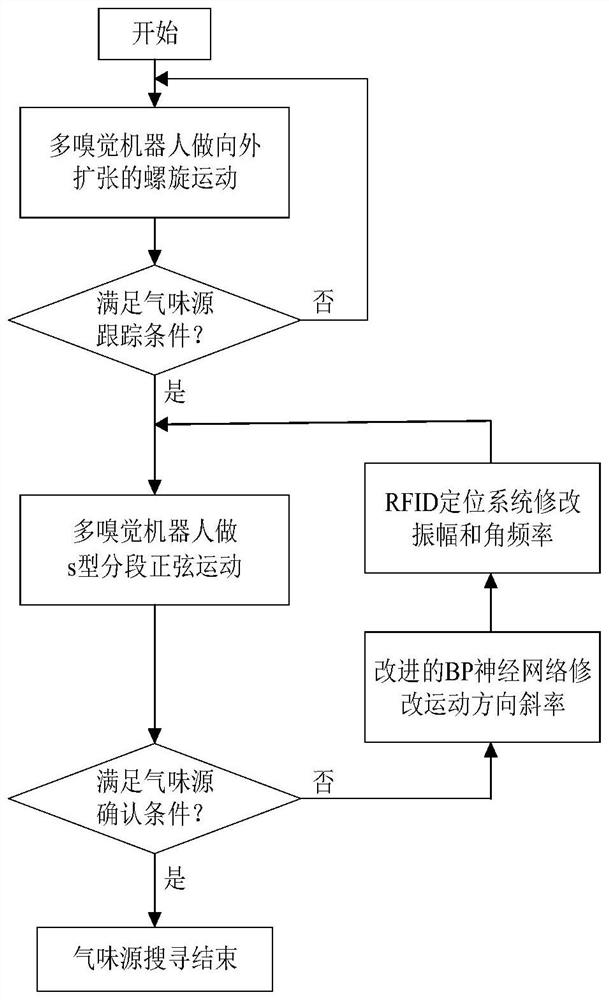
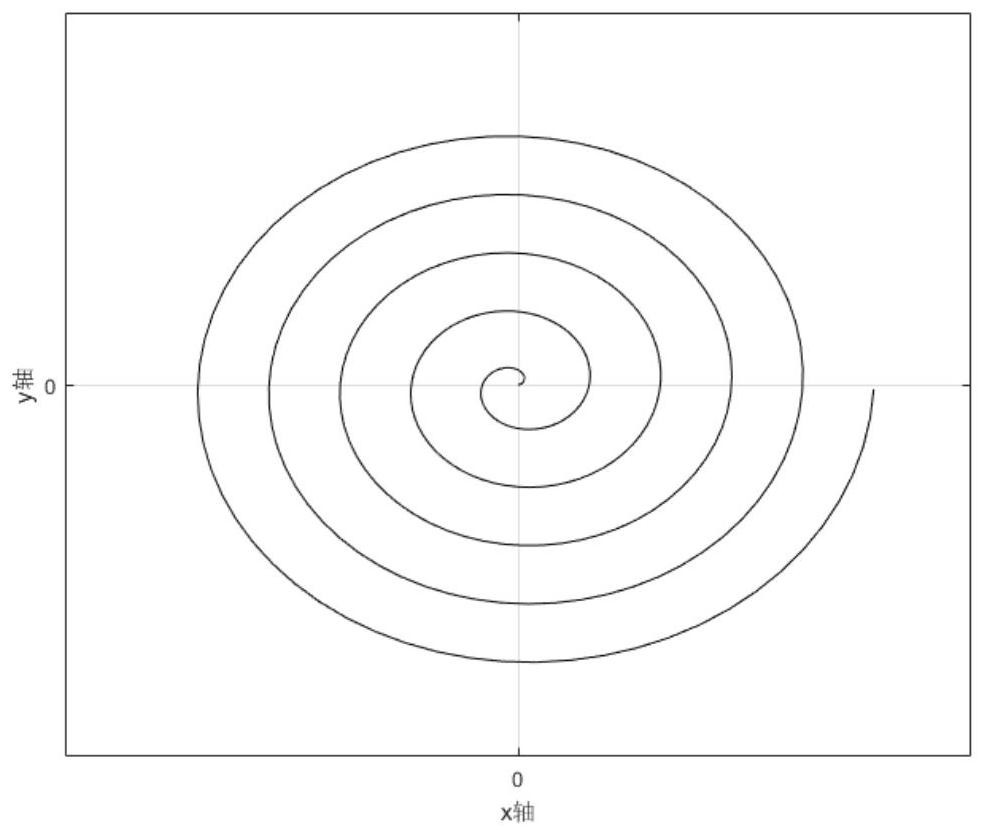
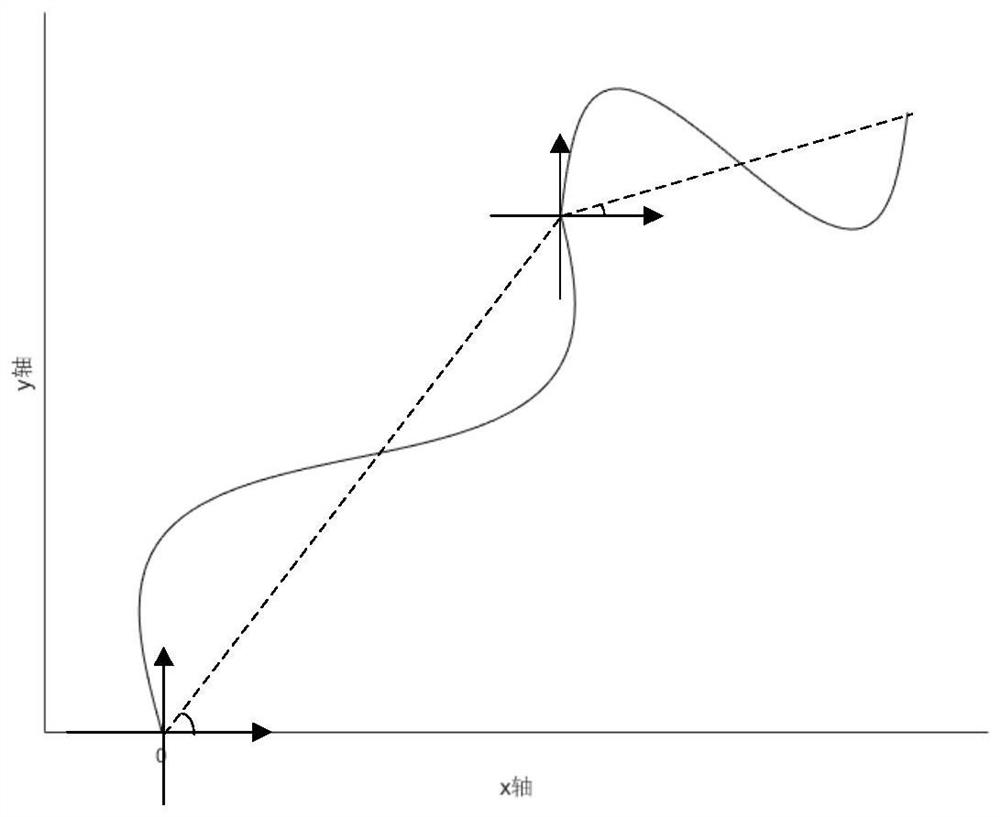
[0053] Such as figure 1 As shown, the present invention proposes a method for locating odor sources coordinated by multiple olfactory robots. Firstly, in the phase of odor source discovery, multiple olfactory robots are randomly distributed in different positions of the two-dimensional search plane, and then all the olfactory robots perform a spiral motion that expands outward; once the gas concentrations measured by any three olfactory robots are greater than the low threshold , at this moment, the above-mentioned three olfactory robots enter the phase of tracking the odor source, and start to make s-shaped segmental sinusoidal motion towards the odor source. Based on the BP neural network and RFID positioning system, the BP neural network dynamically adjusts the weights by using the periodic gradient information to control the movement slope of each cycle of the olfactory robot; the RFID positioning system transmits the gas concentration measured by multiple olfactory robots...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com