Method for generating feasible region label based on laser radar
A technology of lidar and passing area, applied in the field of deep neural network, can solve the problems of time-consuming, labor-intensive, high labor cost, etc., and achieve the effect of reducing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
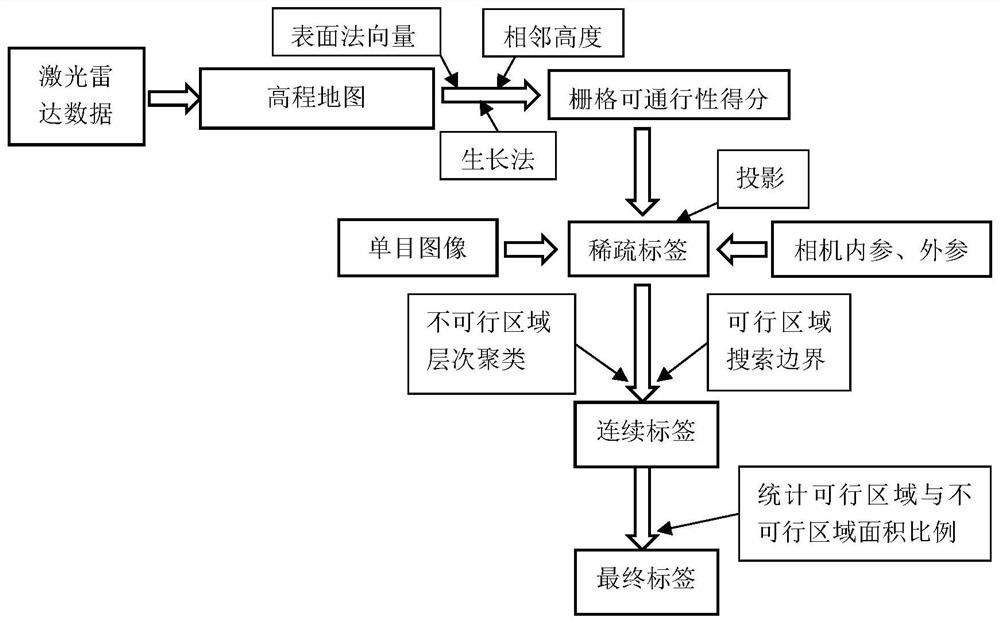
[0047] figure 1 It is a schematic flow chart of the method for generating a passable area label based on laser radar in the present invention. The present invention discloses a method for generating a passable area label based on laser radar, which includes the following steps:
[0048] Obtain lidar data and monocular camera images of the robot;
[0049] Build an elevation map based on current lidar data;
[0050] Calculate the raster's traversability score based on the height information of each raster on the elevation map;
[0051] According to the external parameter and internal parameter matrix of the monocular camera, the feasibility score of each grid on the elevation map is mapped to the image, and the monocular image with sparse grid information is obtained.
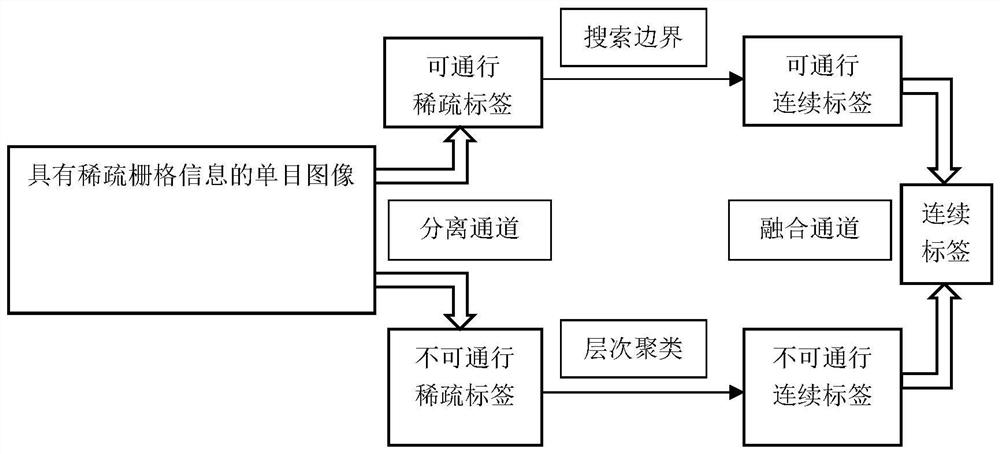
[0052] Based on monocular images with sparse raste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com