Automatic obstacle avoidance algorithm of fire extinguishing robot
A fire-fighting robot and automatic obstacle avoidance technology, which is applied in the direction of motor vehicles, instruments, non-electric variable control, etc., can solve the problems of insufficient accuracy and insufficient real-time performance, and achieve the effect of improving processing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
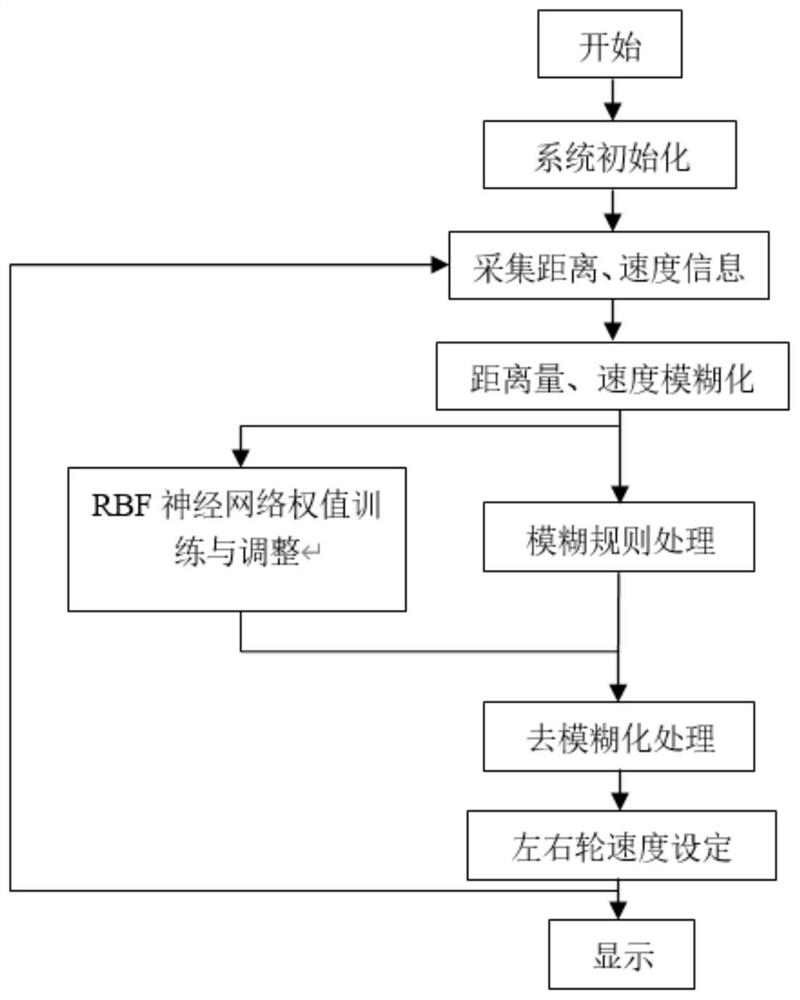
[0034] refer to figure 1 , an automatic obstacle avoidance algorithm for a fire extinguishing robot, including:
[0035] By arranging sensors to collect the position information of obstacles in the field environment relative to the fire-fighting robot, the input obstacle distance D of the obstacle avoidance algorithm is obtained;
[0036] Carry out fuzzy processing on the obstacle distance D and the speed value of the left and right wheels of the fire-fighting robot, and convert the input obstacle distance and the speed value of the left and right wheels of the fire-extinguishing robot into fuzzy language values, and the fuzzy language value variable represents A fuzzy subset of , which corresponds to a certain membership function;
[0037] Carry out the design of the fuzzy neural network control rules, and establish the control rules between the azimuth distance of the obstacle relative to the fire-fighting robot and the fuzzy set that controls the speed of the left and righ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com