Vehicle hardware-in-the-loop simulation training system and method based on deep reinforcement learning
A reinforcement learning and vehicle technology, which is applied in the field of vehicle hardware-in-the-loop simulation training system, can solve the problem that the deep reinforcement learning model cannot be effectively transplanted, and achieve the effects of avoiding inadaptability, improving stability, and ensuring adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and examples. It should be understood that the following examples are intended to facilitate the understanding of the present invention, and have no limiting effect on it.
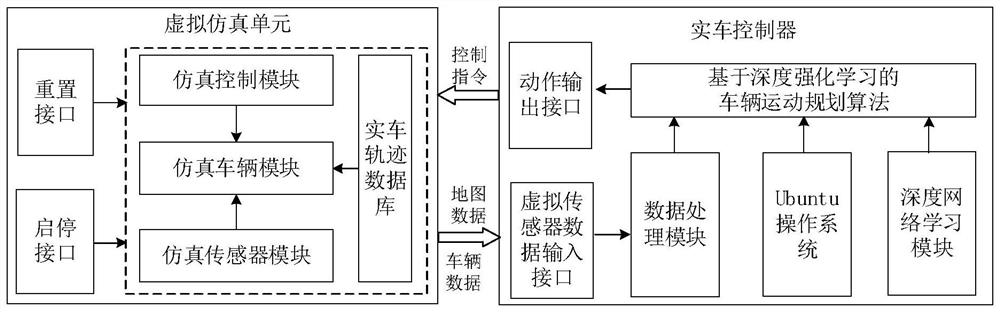
[0046] like figure 1 As shown, the vehicle hardware-in-the-loop simulation training system based on deep reinforcement learning provided by this embodiment includes a virtual simulation unit and a real vehicle controller, wherein the virtual simulation unit includes a simulated vehicle module, a simulation control module, a real vehicle trajectory database, a simulation Sensor module, reset interface and start-stop interface; the real vehicle controller is equipped with ubuntu operating system, deep network learning module, virtual sensor data input interface, data processing module and action output interface.
[0047] The simulated vehicle module of the present invention includes a virtual vehicle m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com