Foreign matter detection method of railway train axle box rotating arm
A technology of foreign object detection and train axis, which is applied in neural learning methods, biological neural network models, image analysis, etc., can solve the problems of low accuracy and low efficiency of fault detection, and achieve improved coverage and accuracy, improved health, and high The effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
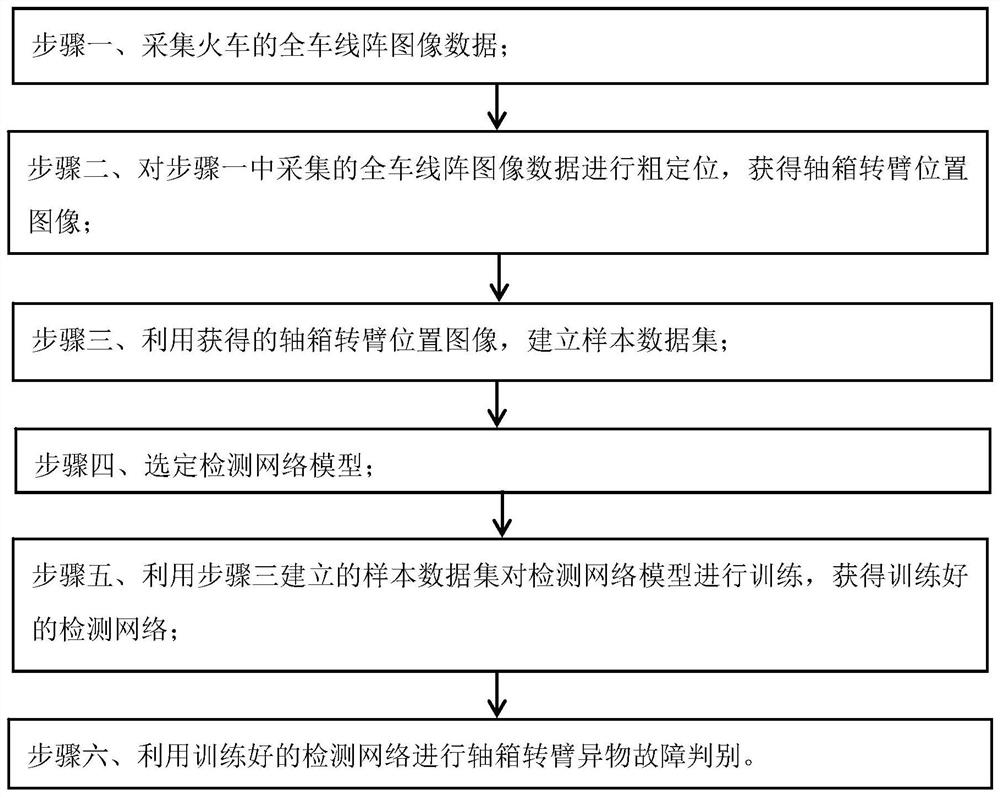
[0074] Specific implementation mode one: combine figure 1 To illustrate this embodiment, the method for detecting foreign objects on the axle box arm of a railway train in this embodiment includes the following steps:
[0075] Step 1, collecting the whole line array image data of the train;
[0076] Step 2: Carry out rough positioning on the line array image data of the whole vehicle collected in step 1, and obtain the position image of the axle box rotating arm;
[0077] Step 3. Using the obtained position image of the axlebox arm, establish a sample data set;
[0078] Step 4, select the detection network model;
[0079] Step 5. Use the sample data set established in step 3 to train the detection network model to obtain a trained detection network;
[0080] Step 6: Utilize the trained detection network to discriminate the foreign matter fault of the axlebox arm.
specific Embodiment approach 2
[0081] Specific embodiment two: the difference between this embodiment and specific embodiment one is that in step one, the whole car line array image data of the train is collected; the specific process is:
[0082] Cameras or video cameras are mounted on fixed equipment around the train track to take pictures of passenger trains running under different conditions. After the passenger train passes the camera or video camera, high-definition grayscale full-vehicle images are obtained.
[0083] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0084] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that in step 2, the line array image data of the entire vehicle collected in step 1 is roughly positioned to obtain the position image of the axle box arm; the specific process is:
[0085] According to the wheelbase information of the axlebox arm and the prior knowledge of the position of the axlebox arm, the position image of the axlebox arm is intercepted from the line array image data of the whole vehicle.
[0086] In this way, the amount of calculation can be reduced and the speed of recognition can be improved.
[0087] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com