AUV course angle control method based on PPGA self-adaptive optimization PID parameters
A control method and heading angle technology, applied in the field of AUV control, can solve the problems of neural network learning lag, slow response, control oscillation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
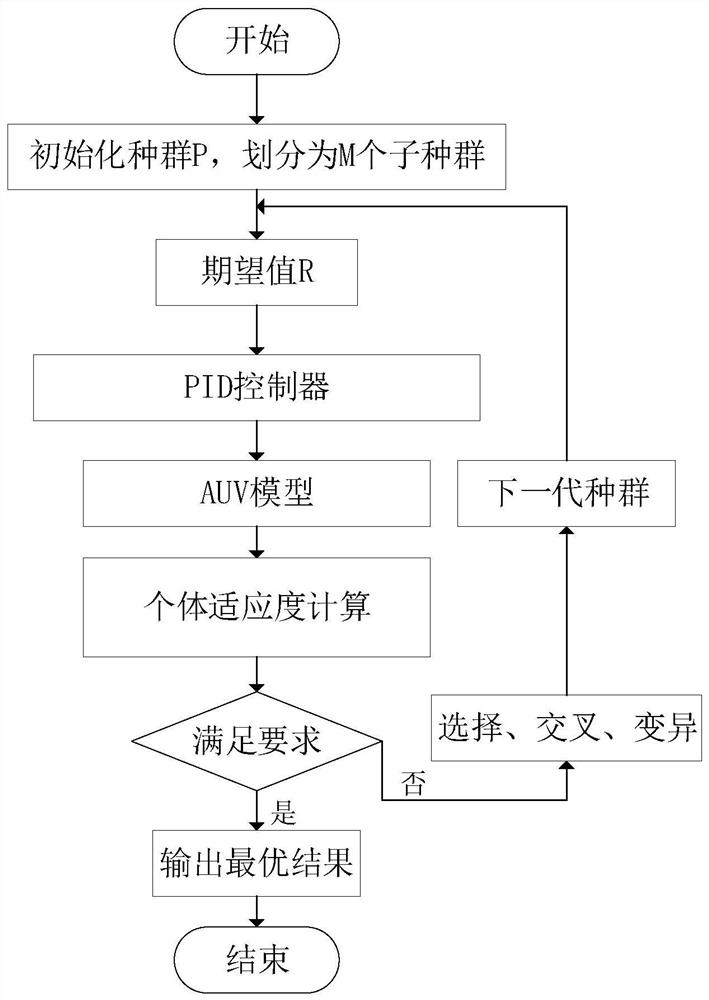
[0035] The flow chart of the AUV heading angle control method based on pseudo-parallel genetic algorithm (PPGA) self-adaptive optimization of PID parameters in the present invention is as follows figure 1 As shown, the specific steps of using this algorithm to realize AUV heading angle control are as follows:
[0036] (1) Using binary coding, the PID parameters Kp, Ki, and Kd are represented by three 17-bit long binary numbers respectively, and the total number of individuals in the population is set to 100, and the initialization population P is randomly formed.
[0037] (2) Divide the population P into M subpopulations. In this embodiment, it is divided into five subpopulations, and the number of individuals in each subpopulation is 20.
[0038] (3) Set the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com