Seven-degree-of-freedom cooperative robot intelligent controller
A robot intelligence and robot technology, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., to achieve the effects of improving motion efficiency and motion accuracy, reducing costs, and reducing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
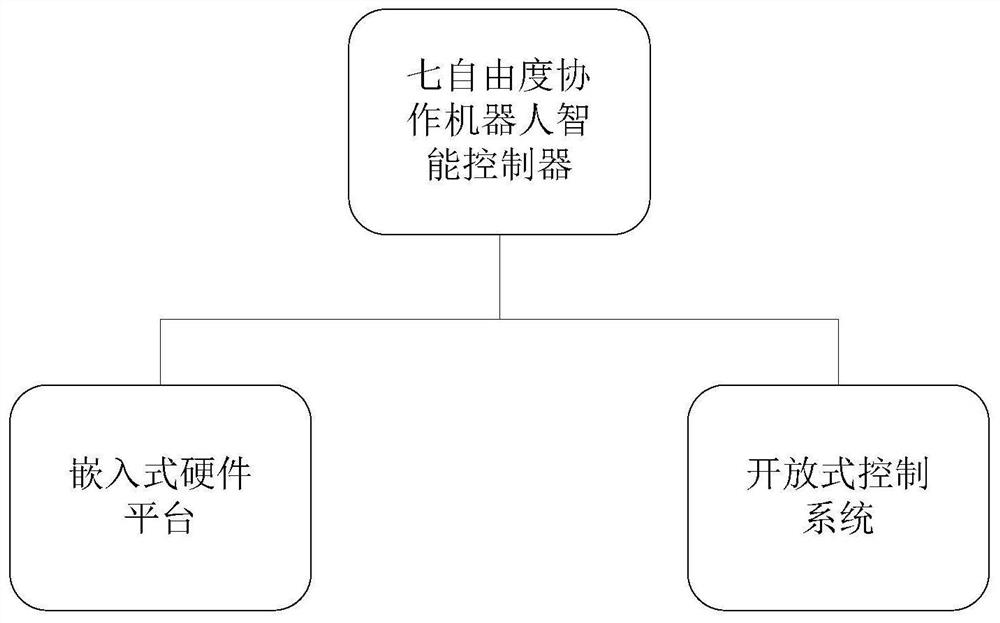
[0050]The embodiment of the present application discloses an intelligent controller for a seven-degree-of-freedom collaborative robot. The intelligent controller includes an embedded hardware platform; Connecting 7DOF 7DOF Collaborative Robots.
[0051] The CPU is a quad-core processor with ARM Cortex-A17 architecture, its highest frequency can reach 1.8GHz, embedded Mali-T760 MP4 graphics processing, supports OpenGL ES1.1 / 2.0 / 3.0, OpenVG1.1, OpenCL, Directx11, And can realize 4Kx2K H.264 and 10bits H.265 video hardware decoding.
[0052] The CPU is configured with 2GB of DDr3 dual-channel memory and 16GB of eMMc high-speed flash memory, and supports the latest wireless 802.11ac protocol 2.4GHz / 5GHz dual-band Wi-Fi, as well as Bluetooth4.0 and Gigabit Ethernet.
[0053] The CPU supports multiple display output interfaces such as dual MIPI, LVDS, HDMI, EDP, and VGA, and supports extended interfaces such as PWM, SPI, UART, ADC, 12C, 12S, and GPIO.
[0054] The size of the inte...
Embodiment 2
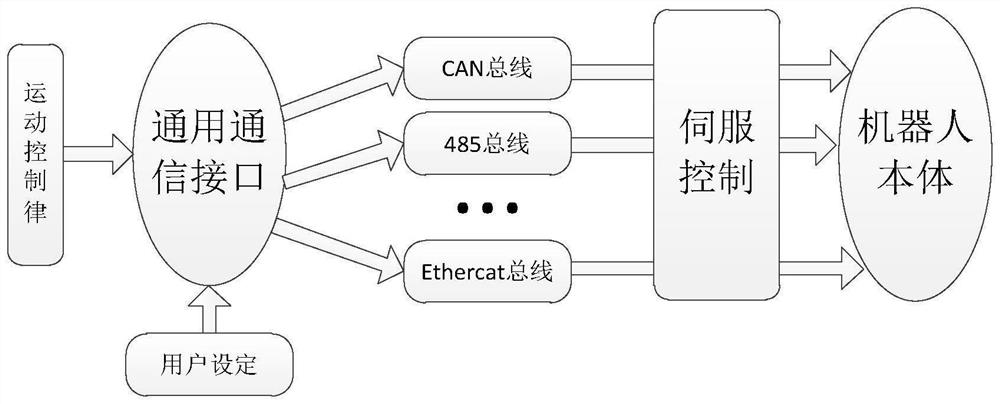
[0099]The embodiment of the present application discloses the control method of the intelligent controller of the seven-degree-of-freedom collaborative robot. The intelligent controller receives the instructions of the host computer software, converts the instructions into the movement path of the robot and executes them, so as to realize the control, planning and monitoring of the movement process of the robot. The movement process and program operation process of the robot ensure the stable and reliable operation of the robot during the multimedia recording process, so that the robot can accurately realize image acquisition. The main steps are:
[0100] (1) Receive control instructions from the teaching pendant;
[0101] (2) Obtain the status information of the seven-degree-of-freedom collaborative robot;
[0102] (3) Generate a robot motion environment model;
[0103] (4) Generate a trajectory without collision with the environment;
[0104] (5) Control the movement of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com