Adaptive dynamic programming method for anti-jamming cacc system
A dynamic programming and self-adaptive technology, applied in control/regulation systems, motor vehicles, non-electric variable control, etc., can solve problems such as the inability to capture vehicle dynamic characteristics well
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0089]The specific embodiments of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments. The following examples are intended to illustrate the present invention, but not to limit the scope of the present invention.
[0090] The heterogeneous fleet model provided in this example comprehensively considers actuator faults and external disturbances, adopts the data-driven ADP algorithm, and designs a collaborative controller, which enables the fleet to achieve the convergence of each vehicle during the entire braking process. And achieve queue stability for the entire fleet.
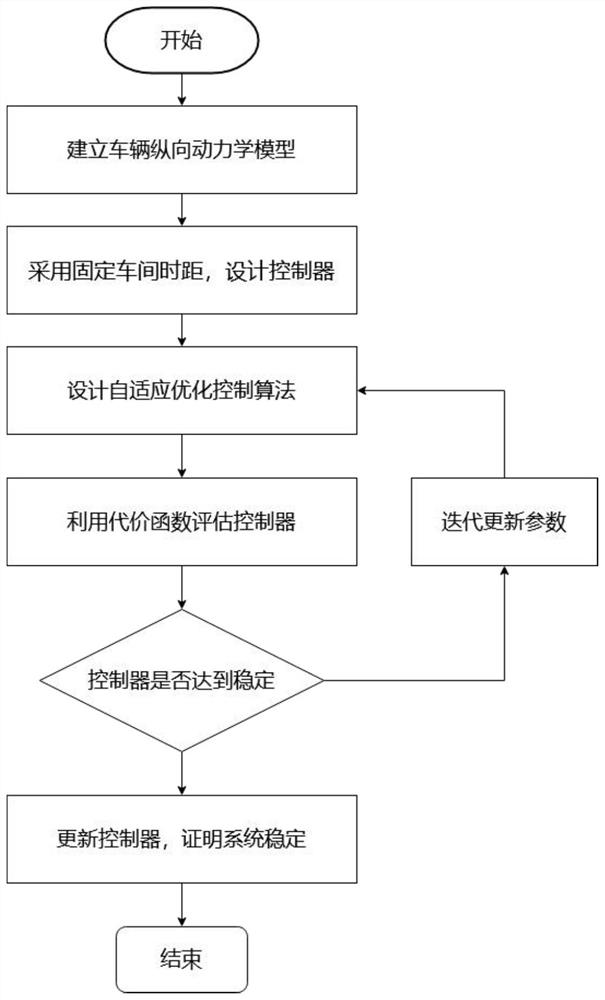
[0091] An adaptive dynamic programming method for an anti-jamming CACC system, such as figure 1 shown, including the following steps:
[0092] Step 1. According to the dynamic performance of the vehicle, construct a fixed time interval strategy, adopt a one-way communication structure, and establish a vehicle longitudinal dynamics model...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com