Intelligent electric vehicle trajectory tracking and motion control method
A smart electric vehicle, trajectory tracking technology, applied in the direction of electric vehicles, control drives, control devices, etc., can solve the problems of reducing vehicle driving safety, control conflicts, and inability to guarantee vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] In order to describe the technical content, structural features, and realization goals of the present invention in detail, the present invention will be fully explained below in conjunction with the accompanying drawings.
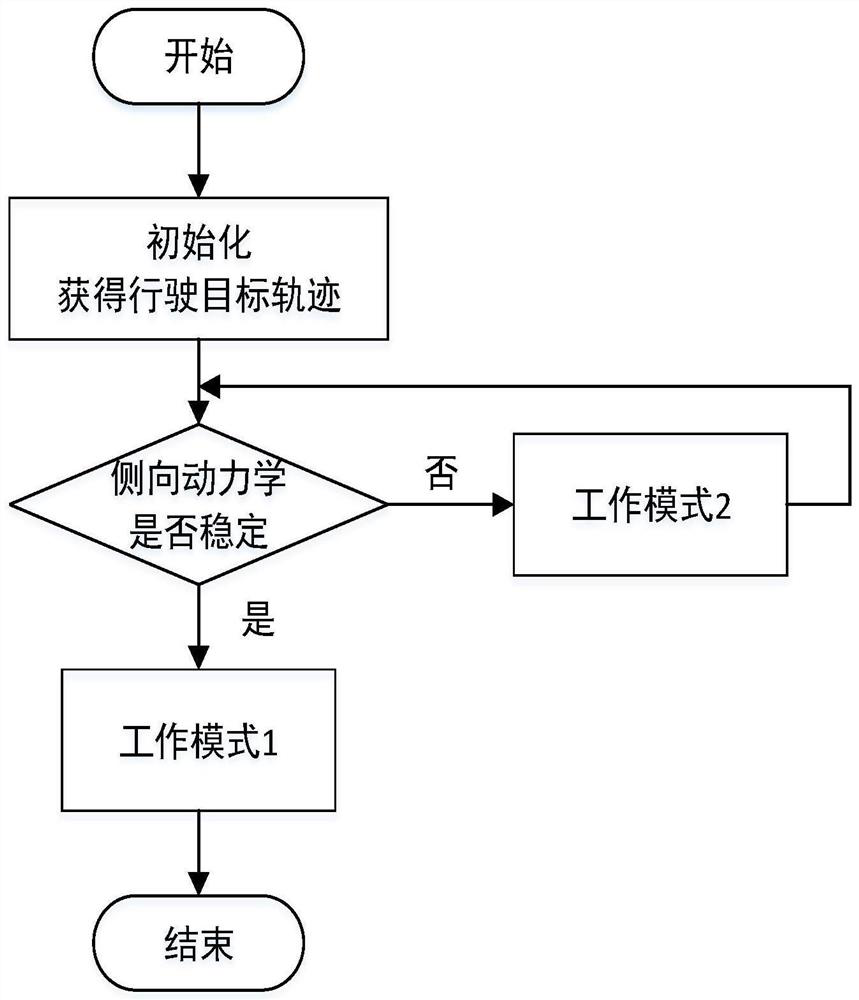
[0093] The overall working frame of the present invention is to adopt the idea of switching control, such as figure 1 As shown, a smart electric vehicle trajectory tracking and motion control method follows the following steps:
[0094] Step 1: According to the given target trajectory and current road conditions, judge whether the vehicle can work within the lateral stability range; if it works within the stable range, perform step 2; if it exceeds the lateral stability range, perform step 3;
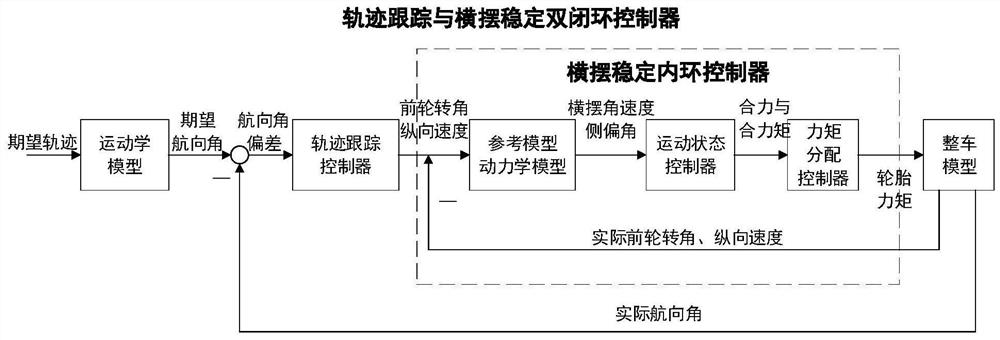
[0095] Step 2: Execute working mode 1, and use the vehicle trajectory tracking and yaw stability dual closed-loop controller to perform vehicle trajectory tracking and stability control, such as figure 2 Shown: According to the expected driving trajectory ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com