Pulse magnetizing crawler walking mechanism and wall-climbing robot
A technology of a wall-climbing robot and a walking mechanism, which is applied in the construction of crawler vehicles, motor vehicles, ships, etc., can solve the problems of the complex structure of the crawler walking mechanism and affecting the rust removal efficiency of the robot.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
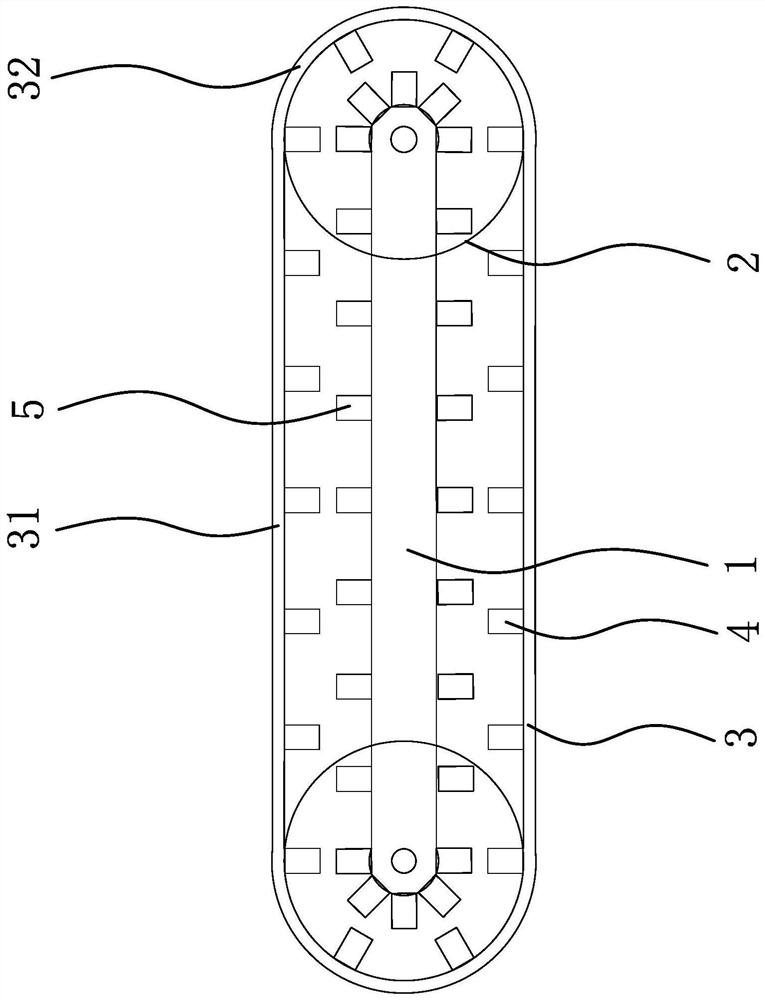
[0021] Such as figure 1 As shown, the pulse magnetized crawler walking mechanism in this embodiment includes a bracket 1, guide wheels 2 arranged at both ends of the bracket 1, and crawler belts 3 sleeved on the two guide wheels 2, and several soft magnetic blocks are arranged inside the crawler belt 3 4. There are several electromagnets 5 on the bracket 1, and the position of the electromagnet 5 on the bracket 1 corresponds to the position of the soft magnetic block 4 on the track 3; the track 3 includes a flat track section 31 and a half-arc track section 32. The flat track section 31 is located between the two guide wheels 2. The inner side of the semi-arc track section 32 is connected to the outer side of the guide wheel 2. The soft magnetic block 4 on the flat track section 31 of each equidistant unit length is larger than that on the corresponding support 1. There is one less electromagnet 5, two soft magnetic blocks 4 per equidistant unit length, three electromagnets 5,...
Embodiment 2
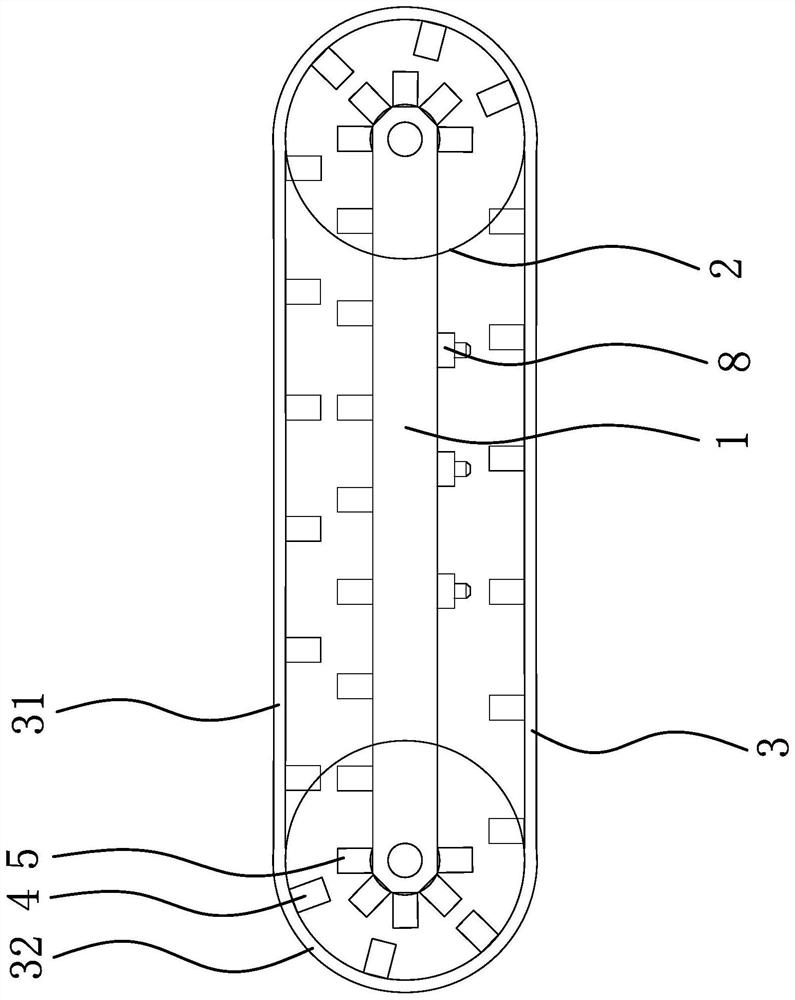
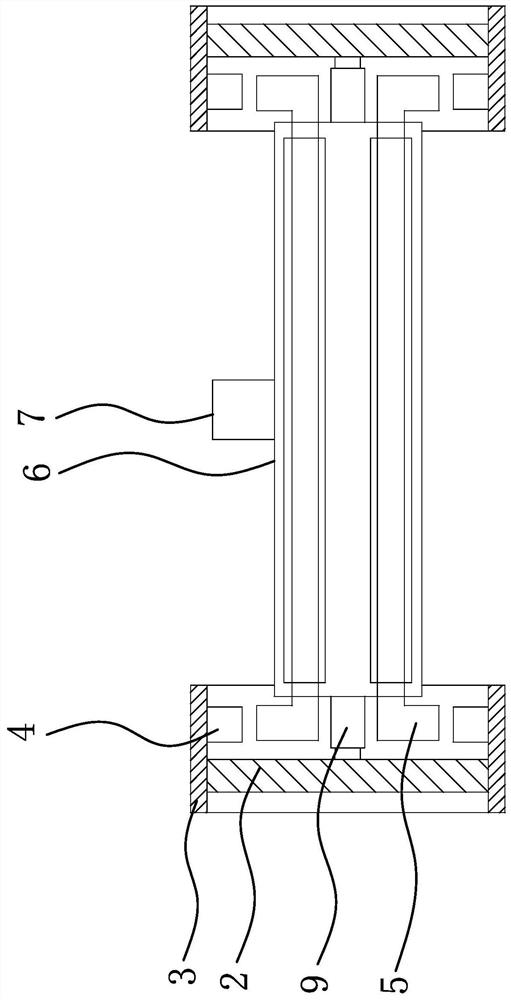
[0023] Such as figure 2 with image 3 As shown, the wall-climbing robot in this embodiment includes two pulse-magnetized crawler running mechanisms in Embodiment 1, the two pulse-magnetized crawler running mechanisms are arranged in parallel and at intervals, and a connecting frame 6 is fixed between them, and the connecting frame 6 is fixed between them. Both sides of the frame 6 are provided with rotating shafts 9 near the two ends, and each rotating shaft 9 is connected to the corresponding guide wheel 2. The connecting frame 6 is provided with a sand washing nozzle 7, and the support of each pulse magnetized crawler walking mechanism 1 lower side is evenly provided with several gas nozzles 8 at intervals, the underside of the support 1 here can not be provided with electromagnet 5, is convenient to install gas nozzles 8, and gas nozzles 8 can blow off the rust adsorbed on the soft magnetic block 4.
[0024] The electromagnet 5 is energized in turn, which can ensure that ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com