


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Gait recognition method based on GRU
A gait recognition and gait technology, applied in the field of prosthetics, can solve problems such as poor comfort, poor real-time performance, low stability and low accuracy, and achieve improved classification accuracy and discrimination efficiency, high practical application value, and realization of The effect of real-time calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof:
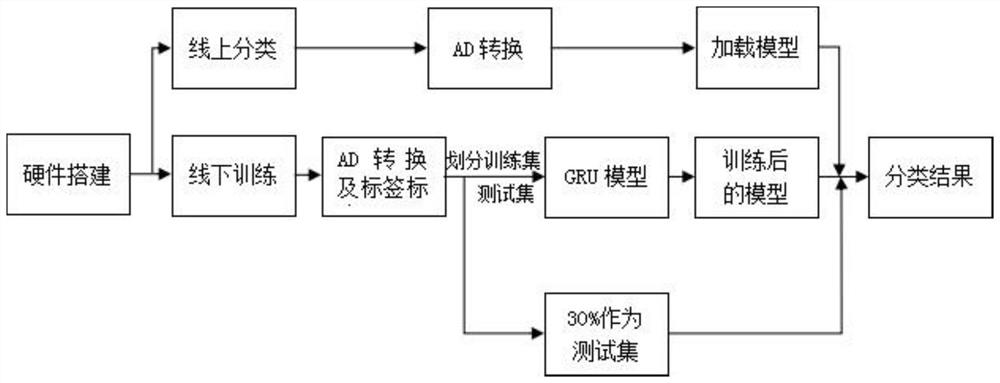
[0033] The present invention provides a kind of gait recognition method based on GRU, method flow chart is as follows figure 1 shown, including the following steps:
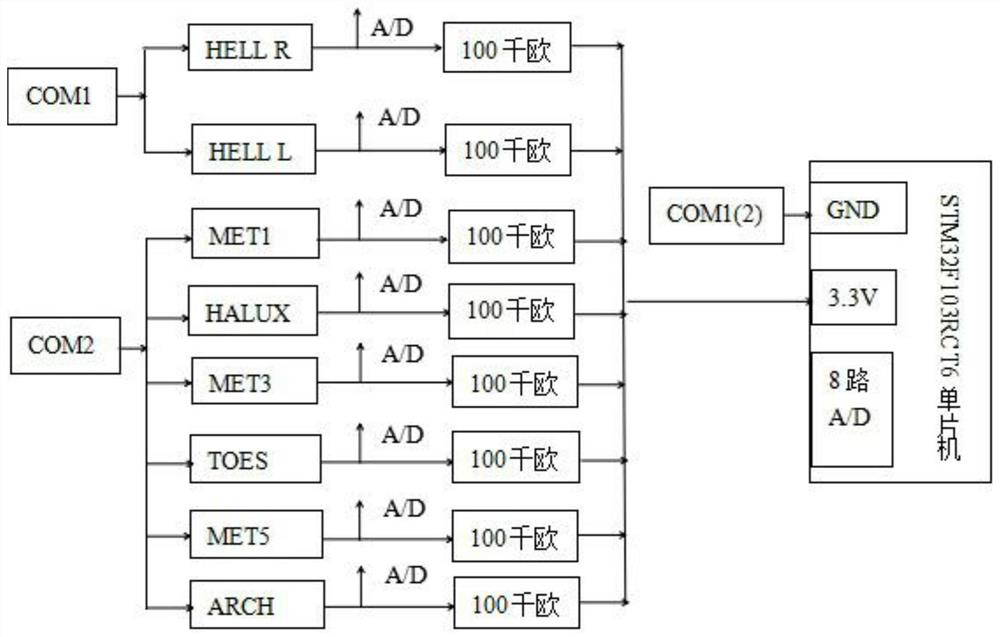
[0034] Step 1: Place the eight-unit high dynamic FSR film pressure sensor insole on the sole of the right foot of the prosthesis to fit the entire sole of the prosthesis, so that figure 2 The HALLUX in the prosthetic foot coincides with the thumb of the prosthetic foot, and the TOES coincides with the little toe of the prosthetic foot. The voltage divider module and the Bluetooth host are connected with the STM32F103RCT6 microcontroller (STM32 for short), and are fixed on the front of the right calf with straps. The machine is tied around the waist with a belt.
[0035] The FSR thin film pressure sensor is used to sense the pressure changes at the eight positions of the prosthetic foot and con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com