Intersection traffic conflict discrimination method based on real-time vehicle track
A technology of traffic conflicts and vehicle trajectories, applied in the field of traffic engineering, can solve problems such as inaccurate target detection and poor tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
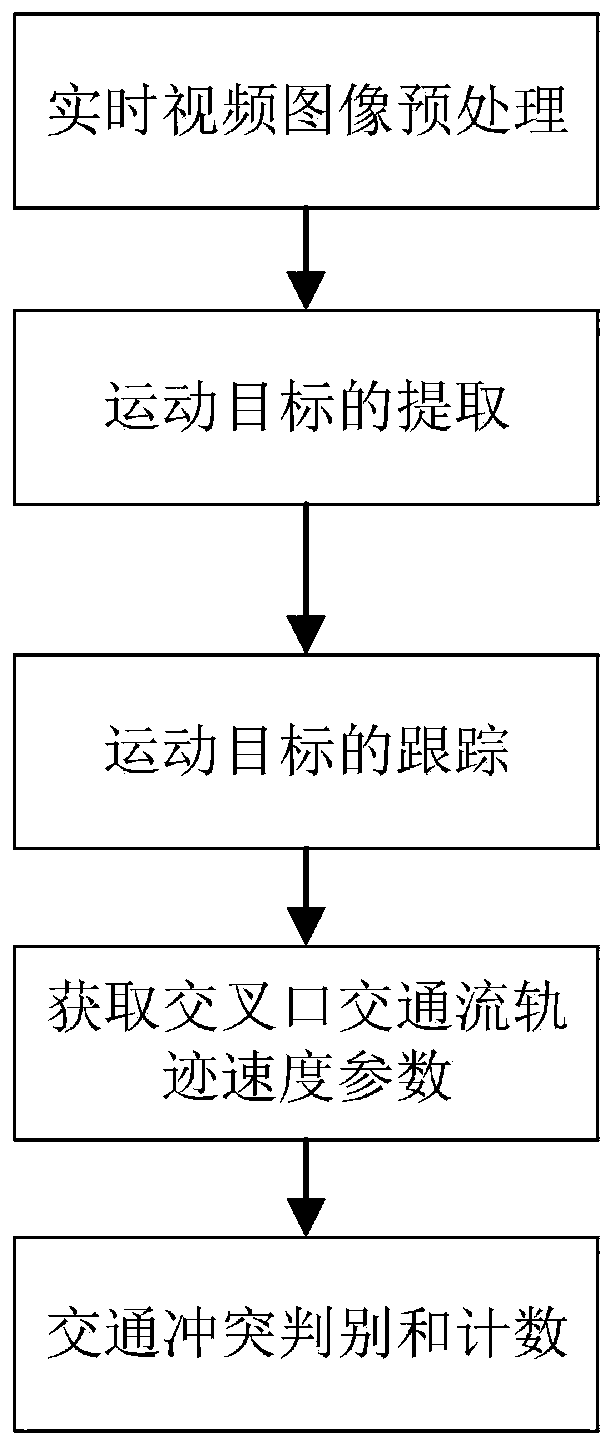
[0077] This embodiment relates to the specific process of a method for judging traffic conflicts at intersections based on real-time vehicle trajectories, such as figure 1 Shown:
[0078] Step 1, collecting real-time video image data, and performing image grayscale, median filtering and binarization preprocessing on it;
[0079] Step 2. Establish a video background model according to the mixed Gaussian background model, and extract vehicle targets through morphological filtering;
[0080] Step 3, according to the centroid coordinates of the minimum circumscribed rectangular frame of the extended Kalman filter method, the running track of the vehicle is obtained, and the moving target is tracked;
[0081] Step 4, collecting traffic flow trajectory velocity parameter data at the intersection;
[0082] Step 5. Based on the real-time traffic flow data, create a vehicle traffic conflict discrimination model and a conflict counting method.
Embodiment 2
[0084] combine figure 2 To illustrate this embodiment, take the intersection of Songshan Road and Huaihe Road in Harbin City as an example. Right-turning vehicles at this intersection are not subject to signal restrictions, so there may be traffic conflicts between straight-going and right-turning vehicles.
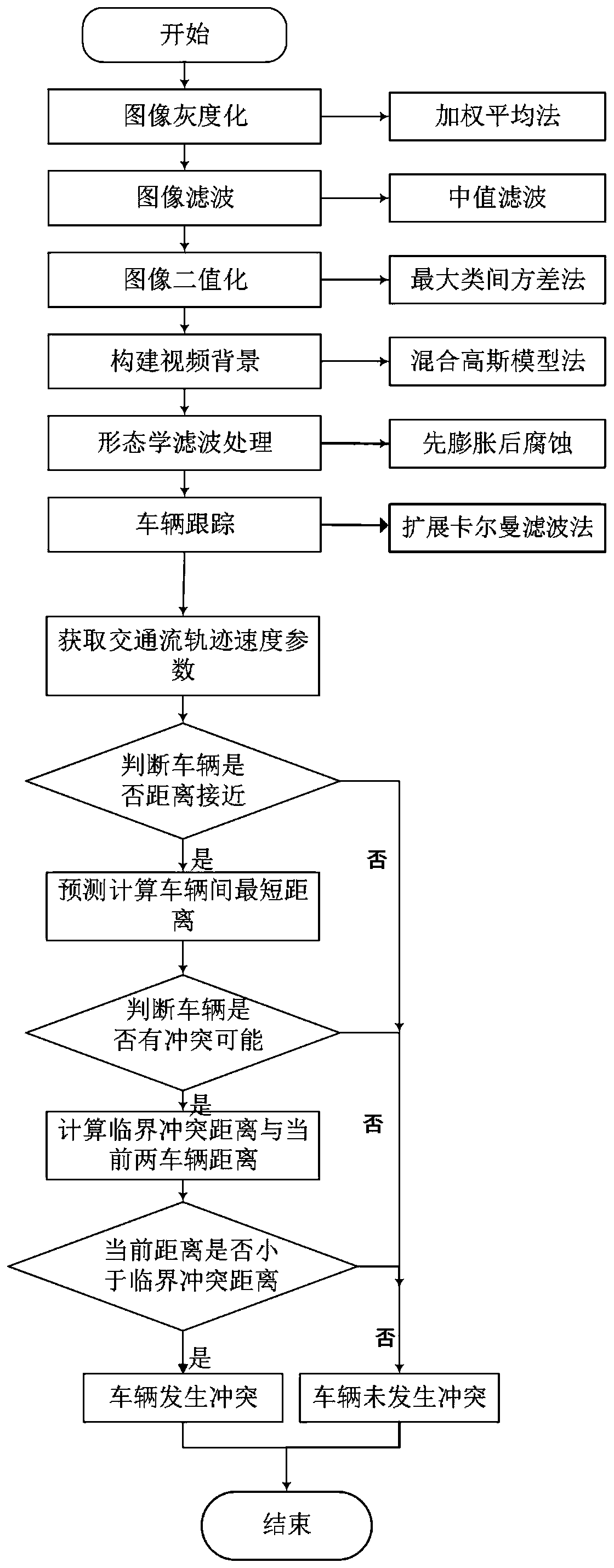
[0085] In this embodiment, the specific process of preprocessing the image grayscale, median filter and binarization in the above steps is as follows:
[0086] (1) Using the moving average method to grayscale the video image, the formula for converting color pixels to grayscale pixels is:
[0087] GRAY=0.299R+0.587G+0.114B
[0088] In the formula, R, G, B——the red, green, and blue components of the original image;
[0089] For images before and after processing, see Figure 3a and 3b .
[0090] (2) Perform median filtering and denoising processing on the grayscaled image, see Figure 3c , the formula of the two-dimensional median filter is as follows:
[0091] g(x...
Embodiment 3
[0103] combine figure 2 and Figure 4 To illustrate this embodiment, in this embodiment, the above step 2 establishes a video background model according to the mixed Gaussian background model, and the specific process of extracting the vehicle target through morphological filtering is as follows:
[0104] (1) Use the mixed Gaussian distribution model to establish the background model of the video, and perform background difference to extract the vehicle image. The steps are as follows:
[0105] Step A, initializing K groups of Gaussian models;
[0106] The pixel X in the current frame is differentiated from K models respectively. If the difference result of the i-th group is less than the threshold value (generally 2.5σ), it is called pixel X t , matches with the i-th group of Gaussian models, otherwise it is called mismatch;
[0107] Step B, update the weight, the update formula is:
[0108] ω i,t =(1-a)ω i,t-1 +M i,t a
[0109] where a is the update rate, when the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com