Rapid active disturbance rejection method for air cavity pressure based on extended state observer
An expansion state and observer technology, applied in fluid pressure control, instrumentation, non-electric variable control and other directions, can solve problems such as PID phase lag, reduce adjustment time and dynamic deviation, improve control quality, and improve dynamic response speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
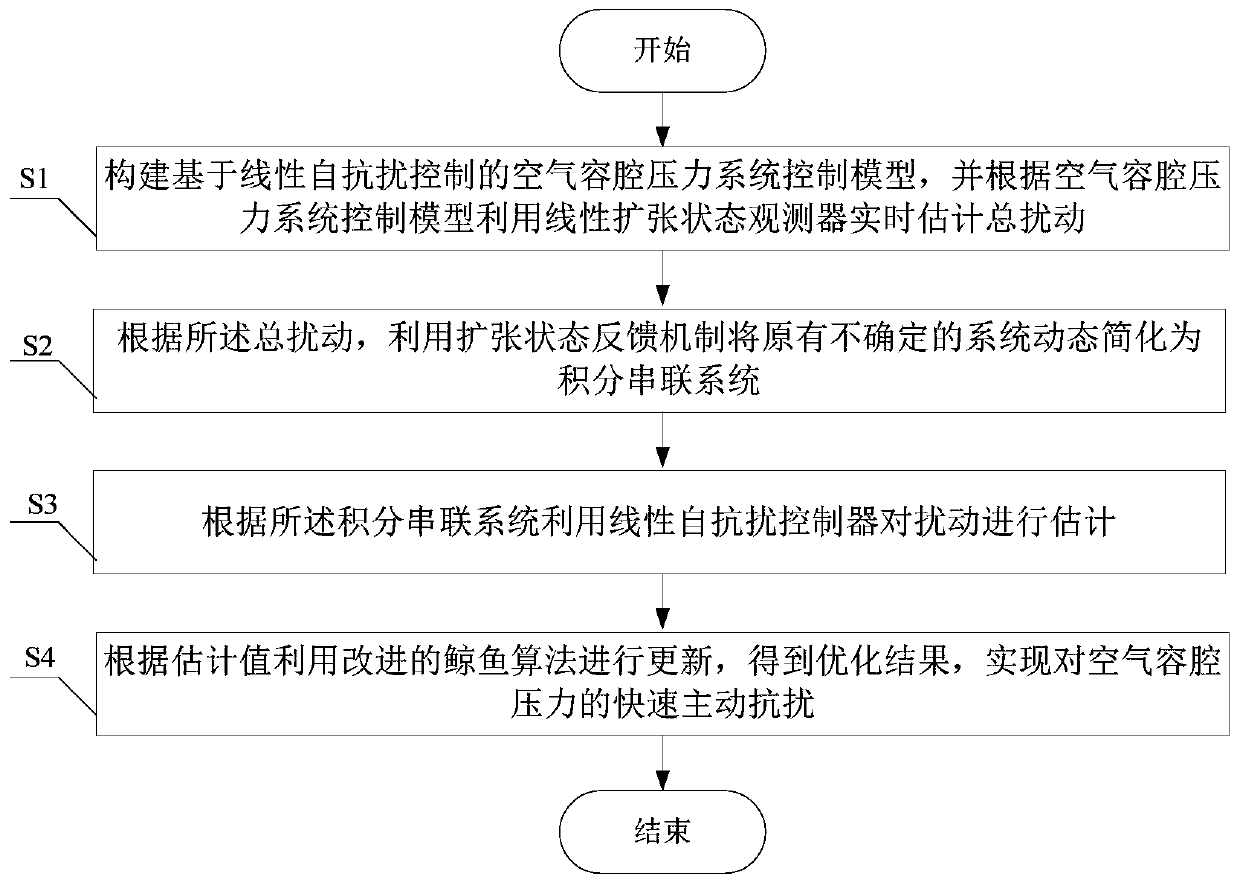
[0052] The air cavity pressure rapid active anti-disturbance method based on the expansion state observer provided by the present invention is suitable for the intake and exhaust pressure control of typical engine transition state test tasks, such as figure 1 As shown, the main steps of the method include:
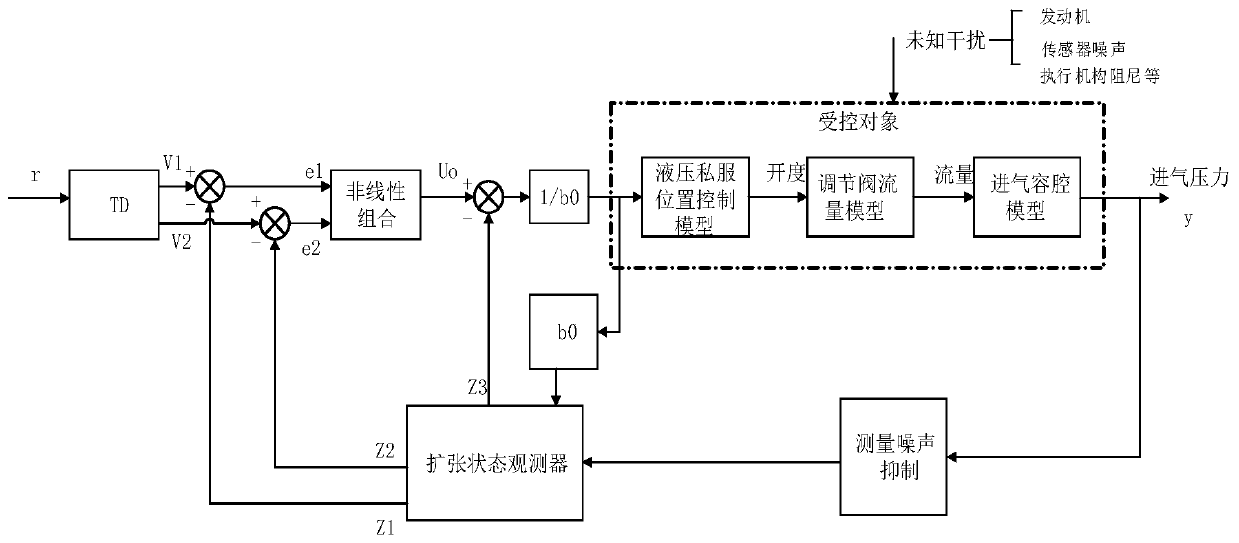
[0053] S1. Construct an air cavity pressure system control model based on linear active disturbance rejection control, and use a linear expansion state observer to estimate the total disturbance in real time according to the air cavity pressure system control model;
[0054] S2. According to the total disturbance, use the extended state feedback mechanism to dynamically transform the original uncertain system into an integral series system;
[0055] S3. Estimate the disturbance by using a linear active disturbance rejection controller according to the integral series system;
[0056] The parameter adjustment of the linear active disturbance rejection controller includes t...
Embodiment 2
[0099] In order to further illustrate the present invention, the flight mission of a certain period of time is taken as an example below with a certain type of engine:
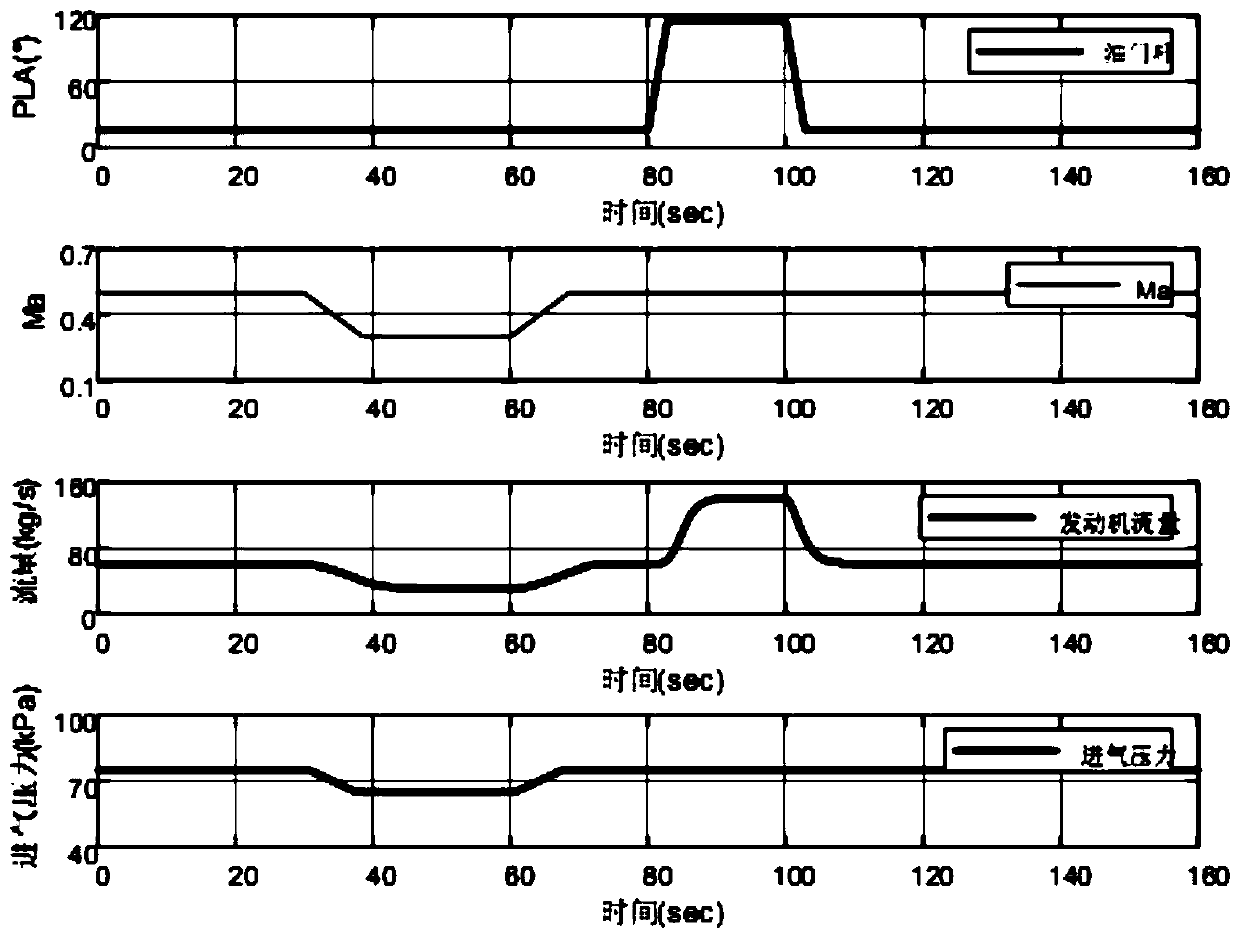
[0100] This flight mission includes two working conditions: 1) The engine test condition (within 0 to 80 seconds) where the throttle lever of the engine remains unchanged and the Mach number changes; Transition state test conditions (80-160 seconds). image 3 From top to bottom, it shows the real-time changes of engine throttle lever, flight Mach number, engine air flow and inlet pressure.
[0101] 1) Working condition 1 (within 0 to 80 seconds): During this process, the engine throttle lever is always in the idle zone. The change of the flight Mach number of the engine is realized by adjusting the intake pressure, that is, the intake pressure is adjusted within 7s at Change within to achieve engine Mach number in changes between. As the Mach number changes, the engine air flow also changes, and its vari...
Embodiment 3
[0105] In the following, the air cavity pressure fast active anti-disturbance method based on the expansion state observer is used to compare the anti-disturbance ability of the controller under the fast operation test condition of the engine throttle lever.
[0106] The main purpose of applying the linear active disturbance rejection controller to the air cavity pressure control system is to solve the problem that the intake pressure is difficult to control in the engine transition state test. The simulation is tested according to the most challenging test conditions. Figure 4 and Figure 6 The control effects of the linear active disturbance rejection controller and PID in the engine transition state test are given respectively. The maximum deviation of the controlled pressure under the action of the PID controller is 6.91kPa (the maximum instantaneous fluctuation is 9.21%), the adjustment time is 20s, and the maximum deviation of the controlled pressure under the action of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com