A method of virtual dragging of manipulator based on webpage
A technology of robotic arms and web pages, applied in manipulators, program-controlled manipulators, geometric CAD, etc., can solve the problems of difficulty in OpenGL programming, unsuitable for extended research, and high development costs, so as to avoid page blocking, improve fluency, and improve cross-platform effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
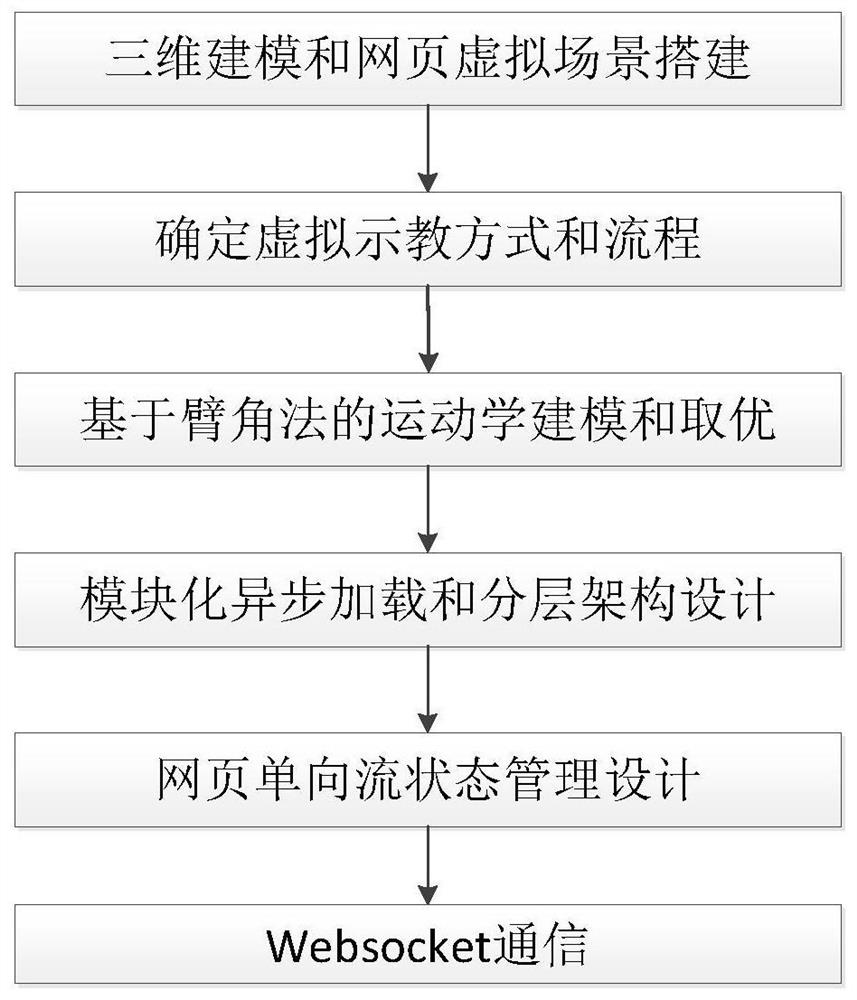
[0058]根据图1所示,本发明提供一种基于网页的机械臂虚拟拖动方法,
[0059]步骤1:建立七自由度机械臂模型,并搭建网页3D虚拟场景,所述网页3D虚拟场景基于Web图形工具Three.js实现;
[0060]步骤2:确定虚拟拖动的实现方式和流程,所述虚拟拖动的实现方式包括鼠标拖动虚拟模型末端和鼠标拖动对应关节角度的交互滑条;
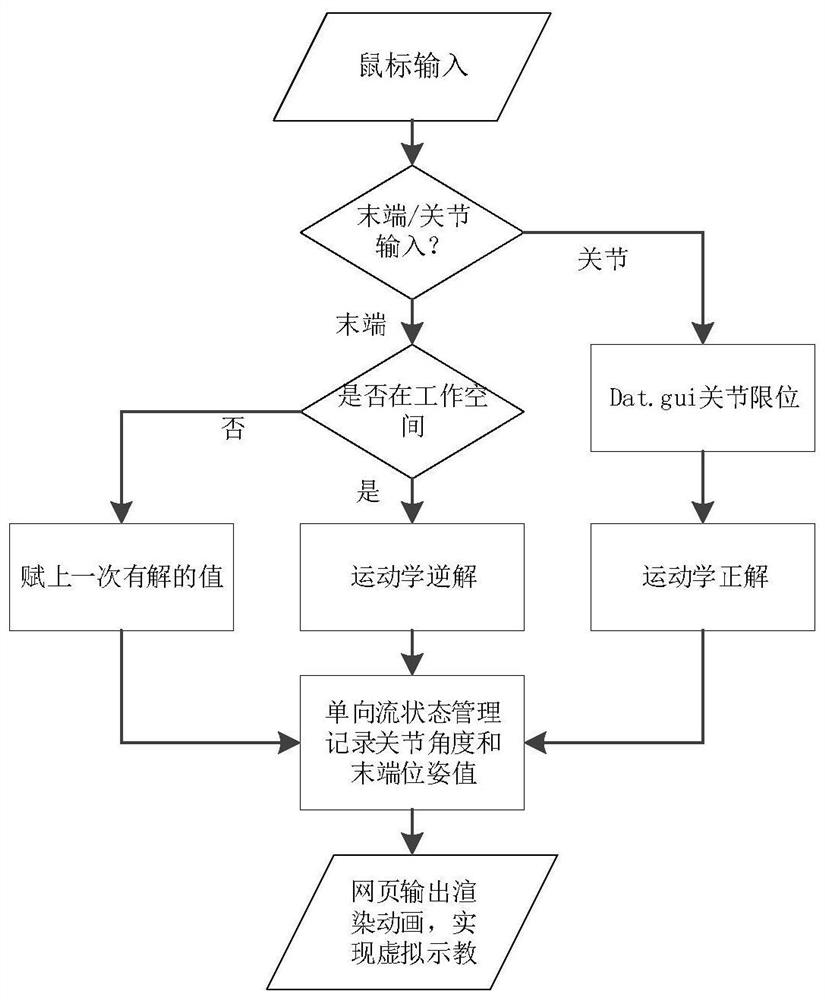
[0061]所述鼠标拖动对应关节角度的交互滑条具体为:通过Three.js提供的dat.Gui.js设计具有关节限位的滑块,用鼠标拖动滑块来实现。
[0062]鼠标拖动虚拟模型末端具体为:将鼠标在虚拟三维空间中的位姿作为机械臂逆解程序的输入量,通过Three.js的TransformControls.js解析鼠标拖动的目标点的位姿,实时输入给逆解程序;逆解程序输出机械臂在末端位姿下的各个关节的绝对角度位置;通过Three.js提供的dat.Gui.js切换鼠标拖动机械臂末端的控制模式,移动控制模式下,姿态值默认原值不变,旋转控制模式下,位置值默认原值不变;姿态旋转通过欧拉角表示。
[0063]确定鼠标输入的末端目标点位姿是否在机械臂的可达工作空间内,当在机械臂的可达工作空间内则进行逆解,输出末端位姿和关节角度值;当不在机械臂的可达工作空间内,则将有解值再一次赋给关节变量,防止无解时JavaScript在无解时而导致虚拟图形无法正常显示,通过单向数据流数据状态管理记录每一次的运算值,实现示教点的记录。
[0064]确定鼠标输入的末端目标点位姿是否在机械臂的可达工作空间内,当在机械臂的可达工作空间内则进行逆解,输出末端位姿和关节角度值;当不在机械臂的可达工作空间内,则将有解值再一次赋给关节变量,防止无解时JavaScript在无解时而导致虚拟图形无法正常显示,通过单向数据流数据状态管理记录每一次的运算值,实现示教点的记录。
[0065]步骤3:基于机械臂臂角参数法对机械臂进行运动学建模,并基于关节权重的距离变化最小原则确定最优解;
[0066]所述步骤3具体为:
[0067]步骤3.1:基于机械臂臂角参数法对机械臂进行运动学建模,机械臂的前三个关节和后三个关节的轴线分别相交于一点,因此前三个关节和后三个关节分别等价于一个虚拟的球形关节,分别表示为s和w。对于所采用7自由度拟人机械臂,给定臂的末端相对于基系{0}的目标姿态和位置矩阵其中:0lbs=[0,0...
specific Embodiment 2
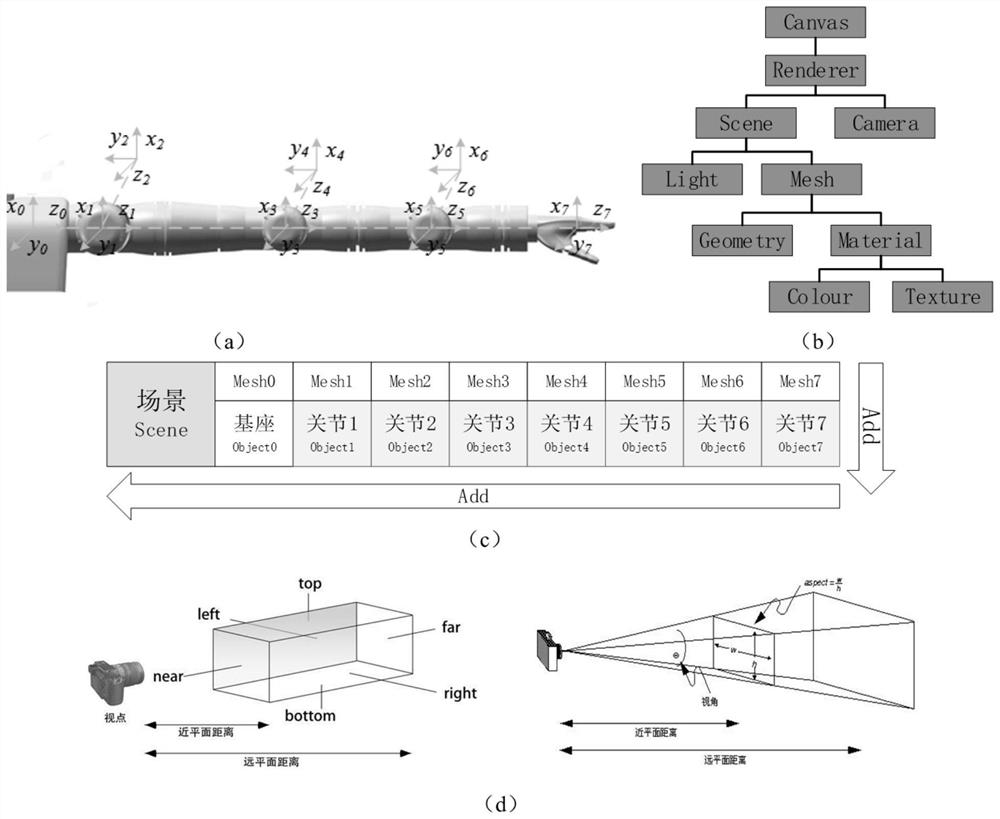
[0098]结合图2首先,机械臂的3D模型通过SolidWorks软件(或其他三维建模软件)建立,改进的DH坐标系图如图2(a),主要参数如D-H参数表1所示:
[0099]表1、DH参数
[0100]iθi(deg)di(mm)ai(mm)αi(deg)运动范围(deg)1Θ1(0)-16400[-45,175]2Θ2(0)00-90[-105,85]3Θ3(0)-450.5090[-115,115]4Θ4(0)00-90[0,125]5Θ5(0)-357.5090[-115,115]6Θ6(0)00-90[-85,85]7Θ7(0)-369090[-115,115]
[0101]在SolidWorks中装配好之后在基座中心添加一个参考坐标系(以区别于世界坐标系),然后在另存为选项中选择输出所建立的坐标系,作为以后机械臂的基坐标系。设置后另存为.stl格式,SolidWorks会根据机械臂的不同装配部件逐个生成stl文件。
[0102]在本实施方法中,Three.js应用时只需在html文件的元素中添加脚本路径 . To render objects into a web page, three required components are required: scene, camera, and renderer. There is only one scene in Threejs, which is represented by THREE.Scene. The scene is the container of all objects. All objects in the scene must be added to the scene to be displayed, which is implemented with add. To build a scene, just new an object, the specific implementation code is as follows:
[0103] var scene=new THREE.Scene()
[0104] In addition, Three.js also contains other important components, such as objec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com