Neuromorphic inspiring robot cognitive map building method
A cognitive map and construction method technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of insufficient robustness, mismatching, low efficiency and accuracy of closed-loop detection, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The method will be described in detail below in conjunction with the accompanying drawings and examples.
[0051] Application scenario: The present invention can be applied to building cognitive maps of robots in indoor and outdoor environments. The robot obtains the surrounding environment information through the camera and estimates its own motion, and then builds a cognitive map, which lays the foundation for the robot to perform subsequent navigation tasks. In this example, we use the KITTI open source outdoor dataset.
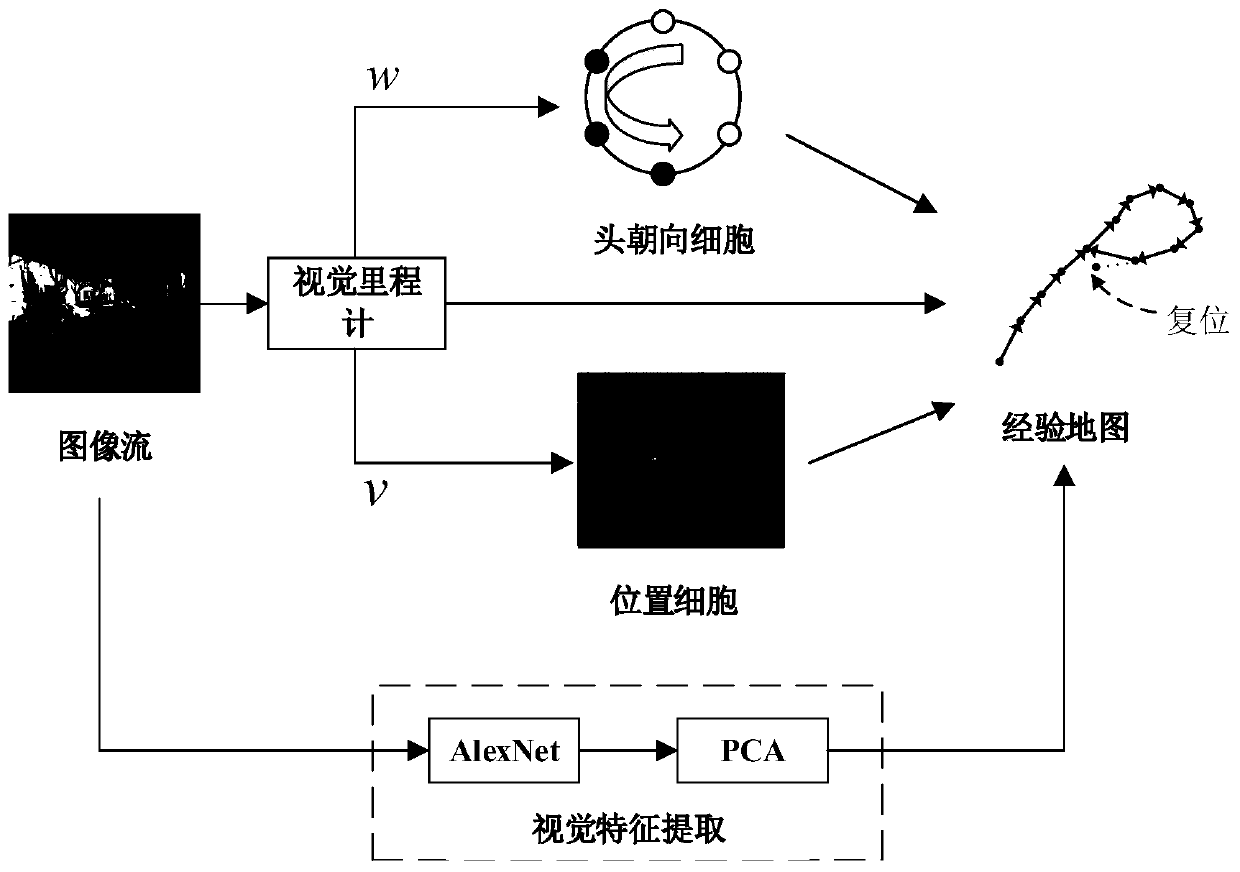
[0052] figure 1 It shows the flow chart of the brain-inspired robot cognitive map construction method. First, the robot explores the environment, obtains the environment information around the robot through the camera, obtains the robot's own motion information through the visual odometer, and then inputs the angular velocity and linear velocity into the head orientation. Cell module and position cell module; input the image information to the vi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com