Airborne point cloud roof plane segmentation method based on octree and boundary optimization
A plane segmentation and boundary optimization technology, applied in image analysis, computer parts, character and pattern recognition, etc., can solve problems such as inaccurate roof plane extraction, achieve important market value, solve poor robustness, and solve boundary inaccuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
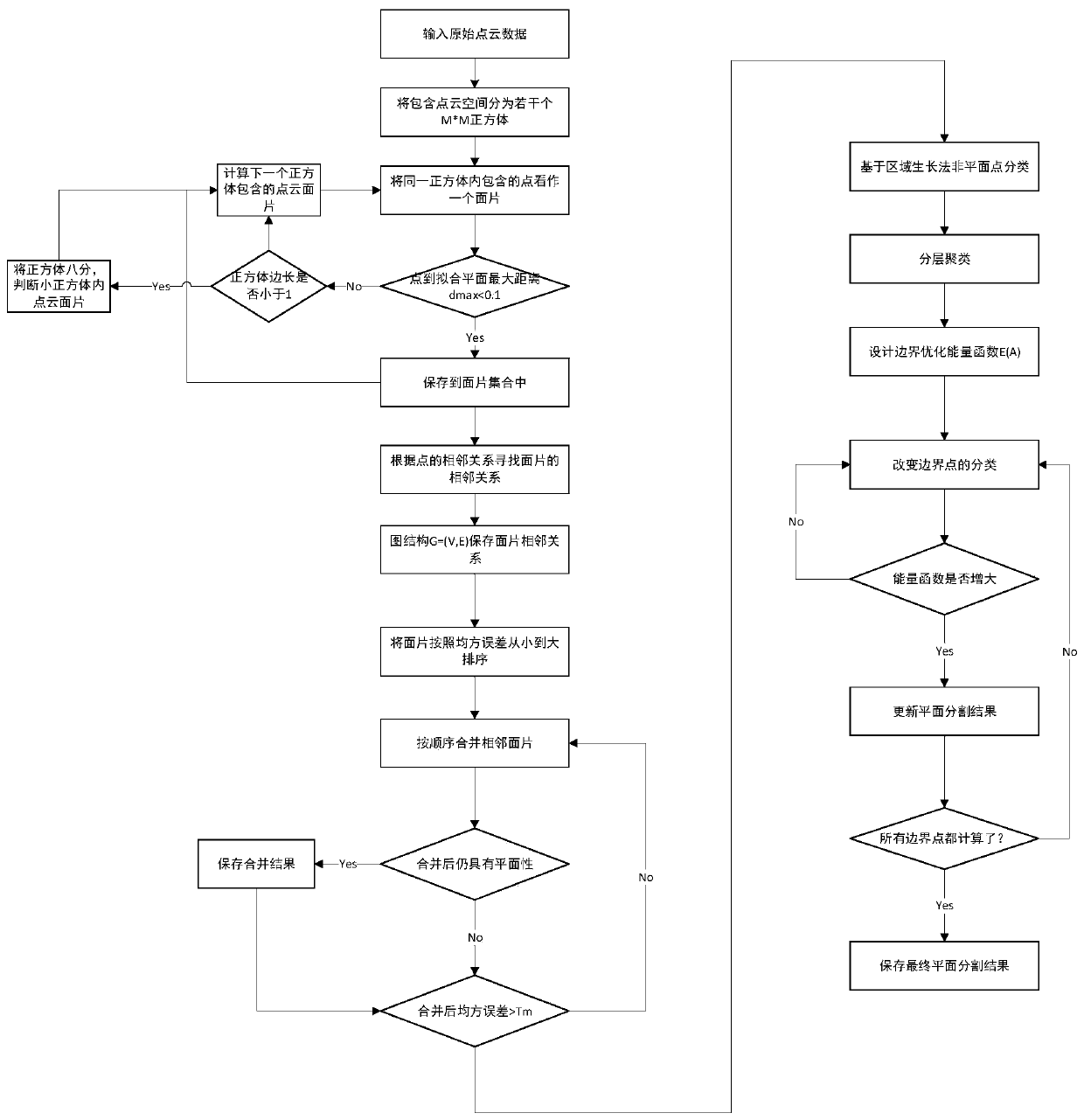
[0057] The embodiment specifically includes the following sub-steps:
[0058] Step 1.1, read the original file of unsequential point cloud data to be processed, store the spatial coordinate value of each point in turn, and obtain the original point cloud point set.
[0059] Step 1.2: Determine the range of point cloud data coordinate values according to the position of the extreme points of the original point cloud coordinates, and construct the vertex position coordinates and dimensions of the smallest cuboid that can contain all point cloud regions. The coordinates of the cuboid are required to be integers.
[0060] Step 1.3, according to the size of the cuboid, it is cut into several sizes of M×M (M=2 m ) of the small cube, denoted as B i , where m≥1, you can get the cube set B={B i}, build a set P that saves the parameters of the planar patch rough . During specific implementation, those skilled in the art can preset the value of m, and i is the label of the small cu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com