Electric power line patrol electric tower detection and identification method and system based on unmanned aerial vehicle
A technology of line patrol tower and identification method, applied in the field of machine learning, can solve problems such as low efficiency, and achieve the effects of improving work efficiency, high detection accuracy, and saving labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
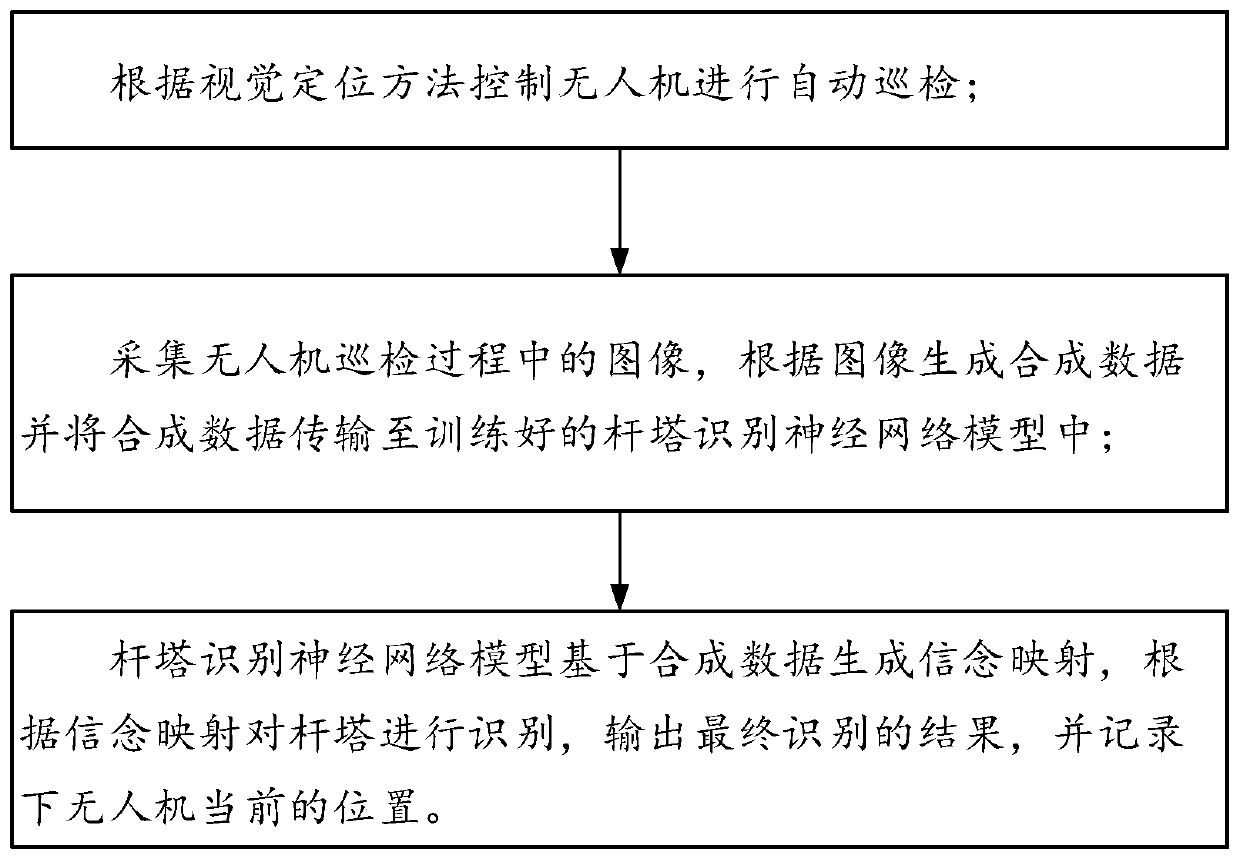
[0043] see figure 1 , figure 1 It is a method flow chart of a UAV-based power line inspection and tower detection and identification method and system provided by an embodiment of the present invention.
[0044] A method for detecting and identifying electric power line inspection towers based on drones provided in this embodiment is applicable to a pre-trained tower recognition neural network model, including the following steps:
[0045] According to the visual positioning method, the UAV is controlled for automatic inspection. During the inspection process, no staff is required to control the UAV. The UAV completes the flight control independently during the inspection process, thereby reducing labor costs.
[0046] Collect images during the inspection process of drones, generate synthetic data based on the images, and transmit the synthetic data to the trained tower recognition neural network model;
[0047] The tower recognition neural network model generates a belief m...
Embodiment 2
[0082] In Example 2, a plug-in is developed based on UE4, which can generate massive amounts of high-quality synthetic data, including RGB images, depth maps, segmentation maps, and tag data files for each frame. By utilizing asynchronous, multi-threaded sequential frame grabbing, the plugin generates data at 50-100Hz, which is much faster than the default UE4 screenshot function. In addition to synthesizing data, the plugin also includes different components, such as scene management components, virtual camera components; by configuring their properties, it is possible to generate highly randomized images. This randomization includes lighting, object and camera positions, poses, textures and disturbances, and camera path following, among other things. These components allow researchers to easily create randomized scenarios to train deep neural networks.
[0083] By importing the model tower into the UE4 scene, using the automatic transmission virtual camera provided by the p...
Embodiment 3
[0087] In the mainstream UAV positioning system, the main implementation method is to use various sensors, such as: laser range finder, ultrasonic sensor, electromagnetic detection sensor, etc., the use of sensors for positioning is relatively disturbed by the surrounding environment, especially in the wireless environment. Various electromagnetic interferences will affect the performance of sensors during human-machine power line inspection, and using machine vision modules to replace these sensors to realize the autonomous flight positioning of drones can avoid these interferences. The working process is as follows: image 3 Shown:
[0088]In this embodiment, the microcomputer uses NVIDIA's latest TX2 development board for deep learning, which integrates many frameworks and environments for deep learning. image signal, and then build a tower recognition neural network model on it to realize 3D object attitude estimation and recognition, so as to realize the autonomous positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com