Self-tuning method and system for permanent magnet synchronous motor current loop PI regulator parameter
A permanent magnet synchronous motor and parameter self-tuning technology, which is used in the control of electromechanical brakes, control systems, and generators. Adapt to tuning, solve the mismatch of actual operating conditions, and avoid the effects of complex calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
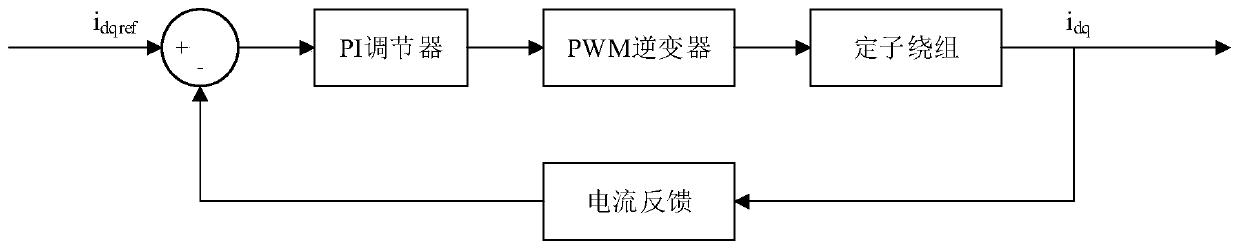
[0035] This embodiment discloses a permanent magnet synchronous motor current loop PI regulator parameter self-tuning system, see the attached figure 2 As shown, the current control loop is divided into four links: PI regulator, PWM inverter, stator winding, and current feedback, and a complete current loop control structure diagram is established.
[0036] Current oversampling and average value filtering can correspond to the current feedback link in the circuit loop. Through oversampling, 16 current data can be obtained in one PWM switching cycle, and averaging these data can play a role in filtering noise, avoiding Use hardware filters (if hardware filters are used, there will inevitably be a large delay in the current feedback link).
[0037] The online real-time identification of motor inductance and resistance is to use the recursive least square method with forgetting factor to "estimate" the current value of the motor inductance and resistance that changes with the wo...
Embodiment 2
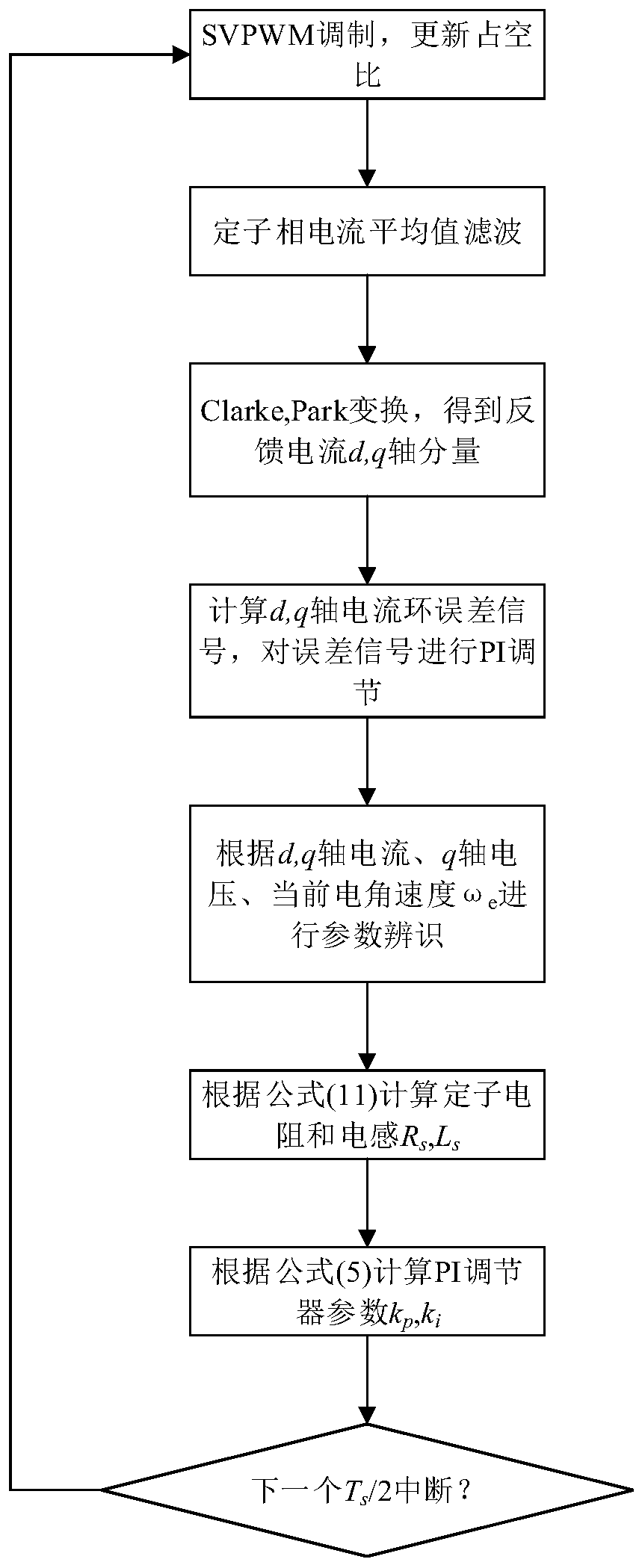
[0048]This embodiment discloses a parameter self-tuning method for the current loop PI regulator of a permanent magnet synchronous motor, see the attached figure 1 As shown, including: SVPWM modulation, update duty ratio, obtain stator phase current average value filtering, perform Clarke transformation and Park transformation, obtain feedback current dq axis components, calculate dq axis current loop error signal, and perform PI adjustment on error signal, Carry out parameter identification based on dq-axis current, q-axis voltage, and current electrical angular velocity, calculate stator resistance and inductance, calculate PI regulator parameters, and judge whether the next half cycle is interrupted.
[0049] For the current loop structure in the general form, the established (the open-loop transfer function here is not the simplest form, but the "general form") current loop open-loop transfer function is:
[0050]
[0051] where k p is the proportional item coefficient...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com