High-sensitivity miniature magnetic sensing unit for underwater navigation, sensor comprising same and preparation method of high-sensitivity miniature magnetic sensing unit
A high-sensitivity, magnetic-sensing technology, applied in the field of magnetic sensors, can solve the problem of lack of high-sensitivity micro-magnetic sensors for underwater vehicles, and achieve the effects of reducing weight and volume, reducing production costs, and achieving good consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0028] Specific implementation mode one: refer to Figure 1 to Figure 6 This embodiment is specifically described. A high-sensitivity miniature magnetic sensor unit for underwater navigation described in this embodiment includes a bias magnetic field belt layer 3, a set The reset current belt layer 4, the four-terminal Wheatstone bridge magnetoresistance layer 5 and the lead layer 6, and the two adjacent layers are electrically insulated by a silicon dioxide layer.
[0029] The bias magnetic field belt layer 3 includes two resistance windings arranged side by side, each resistance winding is spirally arranged to form a rectangular spiral structure, and the wire ends of the two resistance windings located in the outer circle are connected. The material of the resistance winding is aluminum, the line width is 10 μm, the thickness is 1 μm, and the total length of the two resistance windings is 3.1×10 4 μm.
[0030] Specifically, in this embodiment, MEMS technology is used to fa...
specific Embodiment approach 2
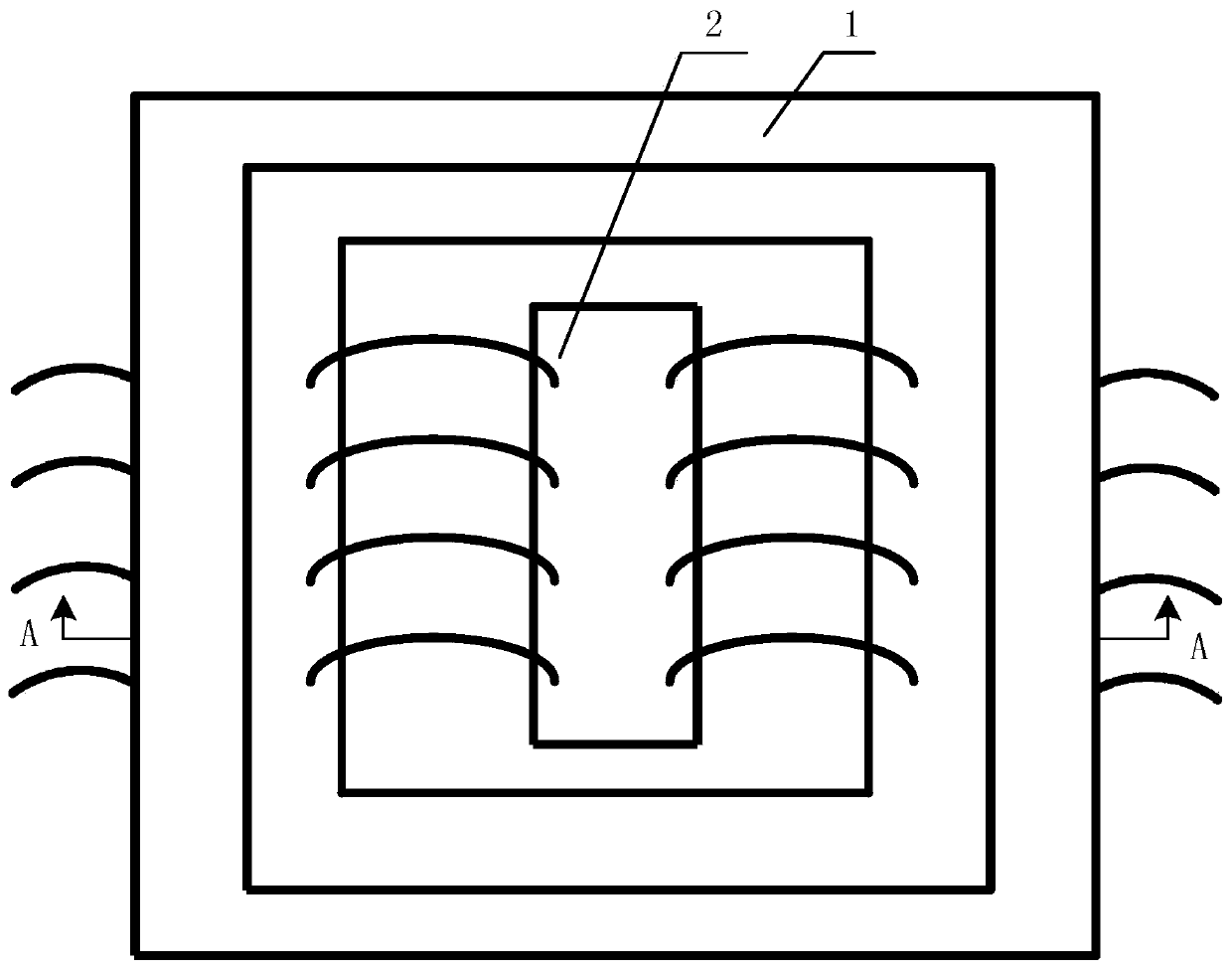
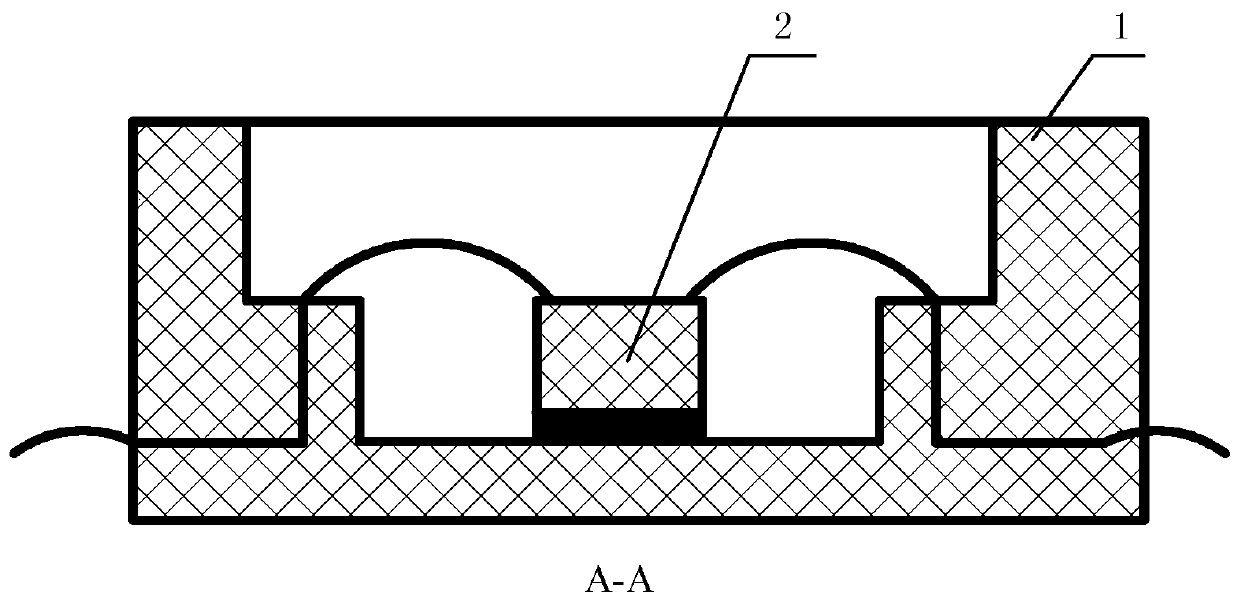
[0036] Specific embodiment two: This embodiment is a sensor containing a high-sensitivity miniature magnetic sensing unit for underwater navigation described in specific embodiment one. This embodiment includes a tube shell 1 and a magnetic field sensing unit 2, and the magnetic field The sensing unit 2 is located inside, the tube shell 1 is made of ceramic material, the magnetic field sensing unit 2 is pasted in the tube shell 1, and the pins of the magnetic field sensing unit 2 are connected with the pins of the tube shell 1 through a pressure welding process.
specific Embodiment approach 3
[0037] Specific embodiment three: This embodiment is a method for preparing a high-sensitivity miniature magnetic sensing unit for underwater navigation described in specific embodiment one. This embodiment includes the following steps:
[0038] step one:
[0039] An aluminum layer with a thickness of 1 μm was prepared on a single crystal silicon substrate with a [1 0 0] crystal orientation by thermal evaporation; two rectangular helical structures arranged side by side were drawn on the metal layer by photolithography, and the two rectangular helical structures The ends located in the outer ring are connected, and the width of the lines drawn by the photoresist in the photolithography process is 10 μm, and the length is 3.1×10 4 μm, with a thickness of 2 μm; the single crystal silicon substrate with photoresist is etched in phosphoric acid at 80°C for 1min to 2min, and the photoresist is removed to obtain a bias magnetic field tape layer 3 .
[0040] Step two:
[0041] Util...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Line width | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
| Width | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com