Lane auxiliary method for controlling steering torque based on vehicle-mounted blind area visual scene analysis
A technology of steering torque and blind spots, applied in the direction of control devices, etc., can solve problems such as imperfect application of assisted driving functions, and achieve the effect of improving lane keeping and changing lanes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
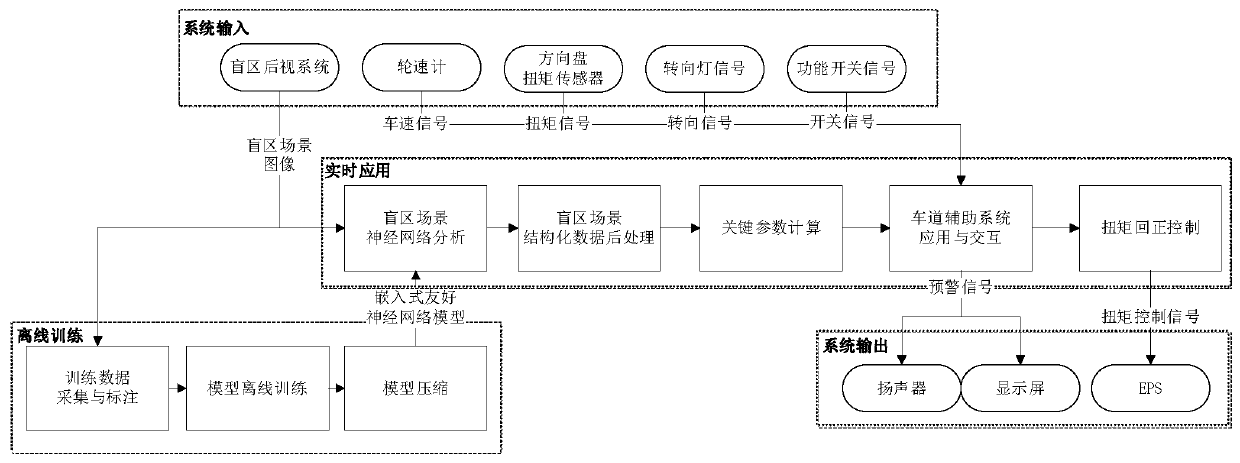
[0063] Embodiment: the lane assisting method of controlling the steering torque based on the visual scene analysis of the vehicle blind spot in this embodiment, such as figure 1 As shown, the blind spot camera, vehicle speed, steering wheel torque, turn signal and system switch signals are the inputs of the lane assist system, and the lane assist warning signal and target steering wheel torque signal are the outputs of the lane assist system. The lane assistance method of this embodiment, the detailed steps are as follows:
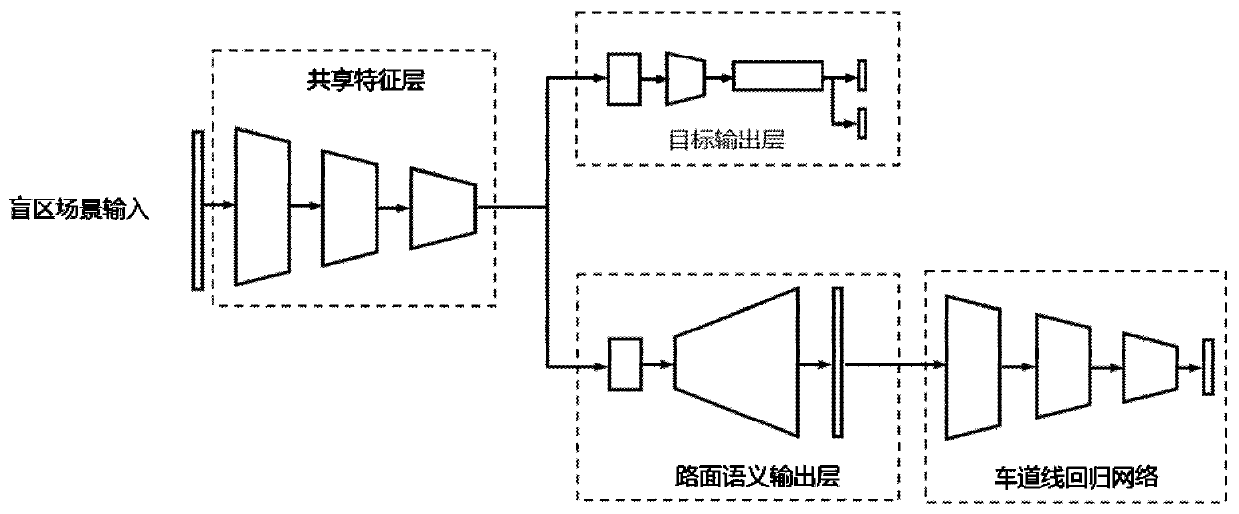
[0064] ① Blind spot visual scene input analysis: Based on deep convolutional neural network, the vehicle and road marking line joint analysis is performed on the blind spot visual scene input of the vehicle, and the boundary information of the lane where the current vehicle is located and the information of vehicles in the same direction in the adjacent lane are output; mainly including Offline model training and online model deployment and inference are d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com