Automatic parking method based on fusion of vision and ultrasonic perception
An automatic parking and ultrasonic technology, applied in the direction of control devices, etc., can solve the problems of trajectory prediction of moving obstacles, failure to achieve obstacle avoidance effect, and affect the smooth completion of automatic parking, so as to improve robustness and obstacle avoidance reliability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
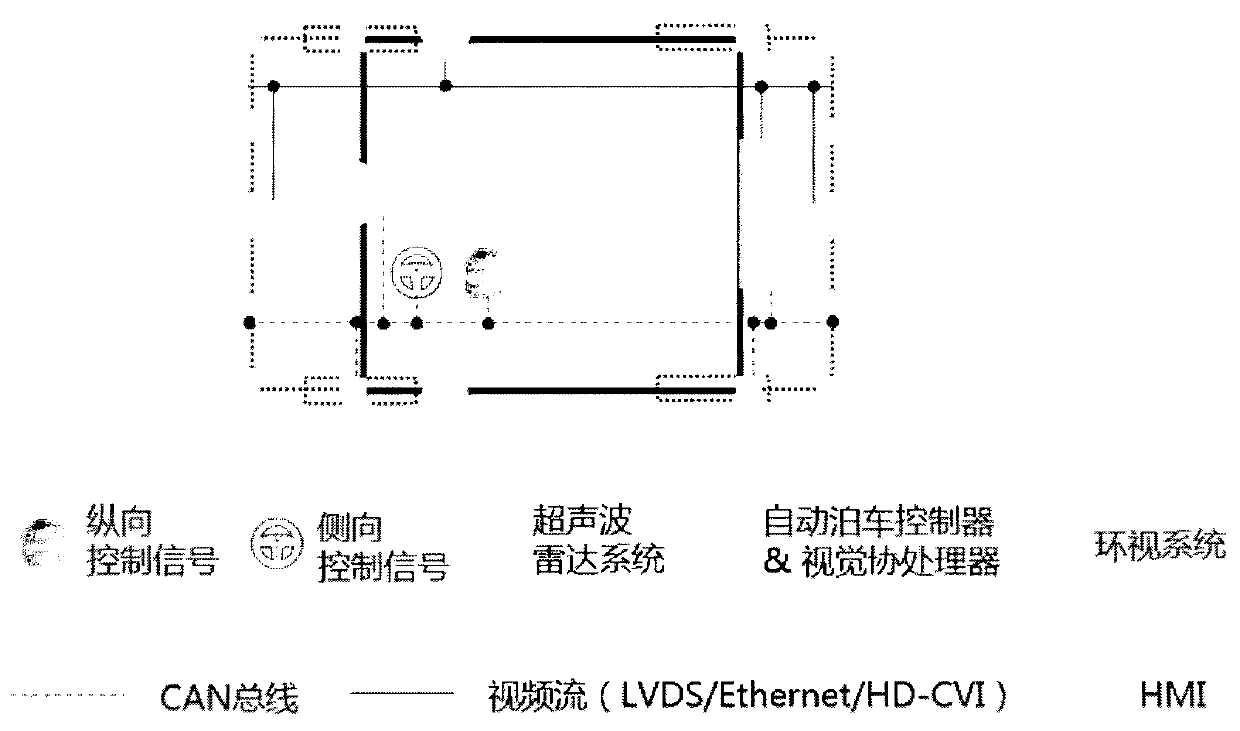
[0069] Embodiment: An automatic parking method based on the fusion of vision and ultrasonic perception in this embodiment can complete the parking space search in a specific scene and complete the automatic parking operation according to the parking space selected by the user. The system hardware architecture based on it Such as figure 1 As shown, it mainly includes a 360° surround view system, an ultrasonic radar system, an automatic parking controller, a visual coprocessor, and an actuator. Among them, the surround view system includes a total of 4 fisheye cameras, each with a horizontal field of view of 180°, which is transmitted to the visual coprocessor (which can be integrated with the automatic parking controller) through the HD-CVI protocol (or LVDS) , and send relevant information (including visual parking space, target parking space and drivable area) to the automatic parking controller after processing. The ultrasonic radar system includes a total of 12 ultrasonic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com