Method for predicting dynamic trajectory of moving object under fixed air route task
A technology for moving objects and trajectory prediction, which is applied in special data processing applications, instruments, electrical digital data processing, etc., and can solve problems such as offline model failure and low trajectory prediction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
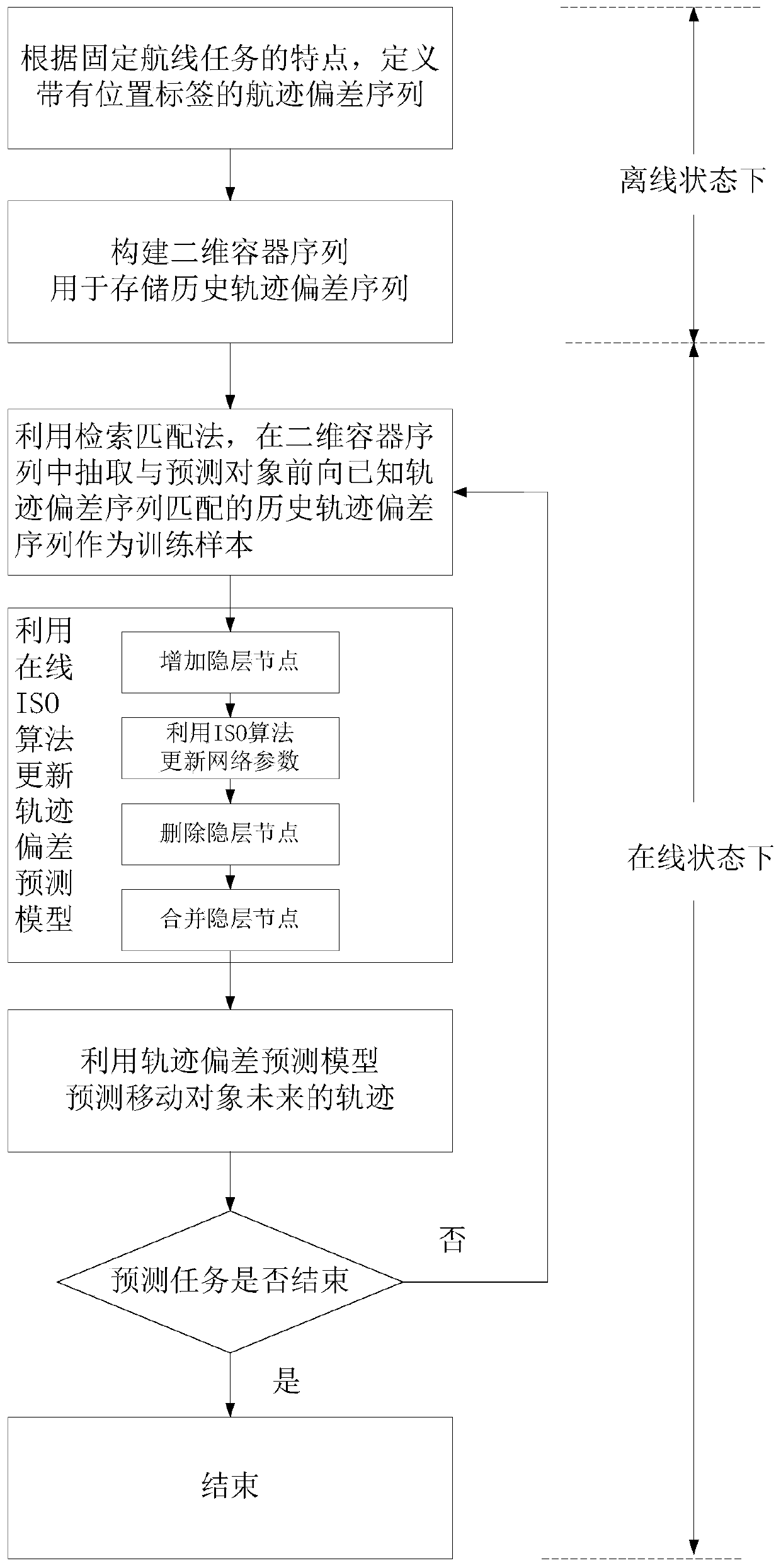
[0088] Specific implementation mode one: the specific process of the method for predicting the dynamic trajectory of a moving object under a fixed route task in this implementation mode is as follows:
[0089] The invention acquires sample sets online and establishes a trajectory prediction model online, so that the prediction model can reflect the dynamic influence of the environment on the trajectory of the moving object, thereby improving the trajectory prediction accuracy. Among them, obtaining the sample set online refers to storing the historical trajectory deviation data by constructing a two-dimensional container sequence, and then using the retrieval matching method to obtain the forward known trajectory deviation sequence of the moving object online (because the trajectory deviation sequence of the predicted object before the prediction time is known, so it is called the forward known trajectory trajectory deviation sequence of the prediction object) matched historica...
specific Embodiment approach 2
[0095] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in the step 1, in the offline state, according to the characteristics of the fixed route task, a trajectory deviation sequence with a position label is defined, and a second trajectory deviation sequence is constructed based on the trajectory deviation sequence. dimensional container sequence, and store the historical trajectory deviation data of moving objects under the same route task in the two-dimensional container sequence; the specific process is:
[0096] In order to describe the task of the fixed route, the coordinates of one dimension in the three-dimensional space can be selected as the position label, then the execution of the moving object on the fixed route can be defined by the trajectory of the moving object under the same label and the expected trajectory (fixed task route) in the other two coordinates Dimensions of positional deviation to represent. In additi...
specific Embodiment approach 3
[0105] Specific embodiment 3: The difference between this embodiment and specific embodiment 1 is that in the online state in the step 2, the search matching method is used to retrieve the forward known information of the predicted object in the two-dimensional container sequence obtained in the step 1. Trajectory deviation sequence, the historical trajectory deviation sequence that passes through the same two-dimensional container unit as the forward known trajectory deviation sequence is the matched historical trajectory deviation sequence, and the sample set is composed of the matched historical trajectory deviation sequence; the online ISO algorithm is used to use the sample set, based on the RBF neural network structure, the trajectory deviation prediction model of the moving object is established online; the specific process is:
[0106] Step 21. Use the search matching method to retrieve the forward known trajectory deviation sequence of the predicted object in the two-d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com