Forward vehicle distance detection method
A technology for detecting the vehicle in front and distance, which is applied in the direction of line-of-sight measurement, distance measurement, and measuring device, etc., which can solve the problems of lack of universality of calculation models, failure to determine the specific position of the vehicle in front, and inability to calculate the exact distance of the vehicle in front.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
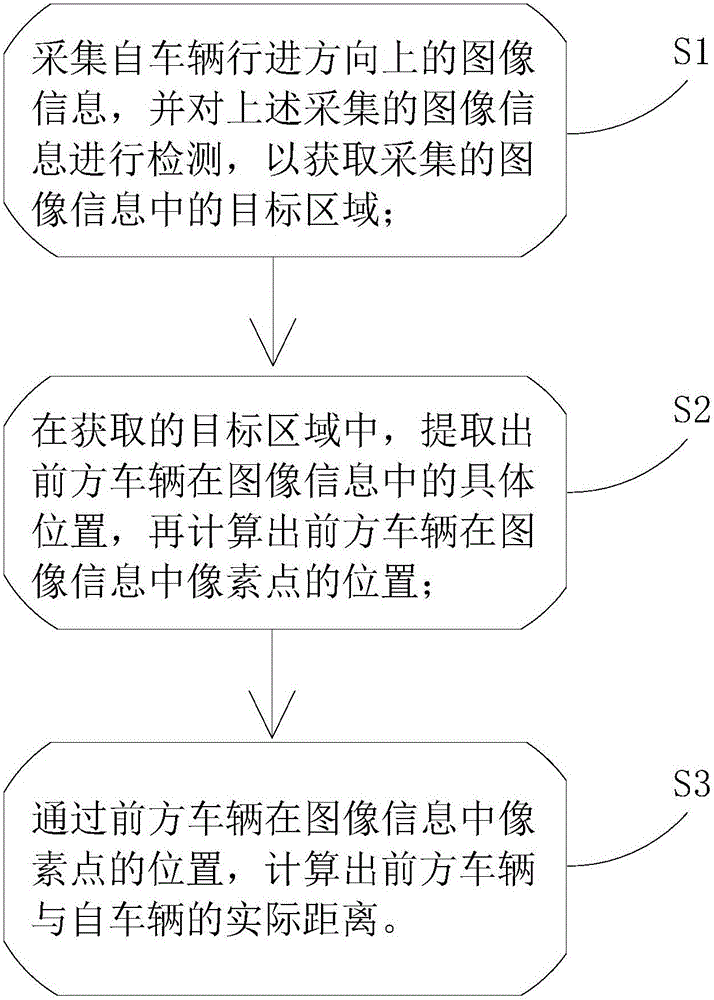
Method used
Image

Examples
Embodiment 1
[0093] On structured roads, when the weather is clear and the light is sufficient, the self-vehicle detects vehicles at different distances in front when the vehicle is traveling at a speed of 30km / h. The actual distances of the vehicles in front are 10m, 20m, 30m, 40m, and 50m respectively; the distance measured according to this method is compared with the actual distance, as shown in Figure 5 ;The measured distance values in the figure are 9.50m, 19.25m, 31.45m, 41.80m, and 52.00m respectively; according to the above experimental results, the errors between the measured values obtained by this method and the actual values are all controlled within 5% .
Embodiment 2
[0095] On structured roads, when the weather is clear and the light is sufficient, the vehicle is detected at different distances ahead when the vehicle is traveling at a speed of 60km / h. The actual distances of the vehicles in front are 10m, 20m, 30m, 40m, and 50m respectively; the distance measured according to this method is compared with the actual distance, as shown in Figure 6 ;The measured distance values in the figure are 10.25m, 20.85m, 31.30m, 42.00m, and 52.50m respectively; according to the above experimental results, the errors between the measured values obtained by this method and the actual values are all controlled within 5% .
Embodiment 3
[0097] On structured roads, when the weather is foggy and the light is insufficient, when the vehicle is traveling at a speed of 30km / h, it detects vehicles at different distances ahead. The actual distances of the vehicles in front are 10m, 20m, 30m, 40m, and 50m respectively; the distance measured according to this method is compared with the actual distance, as shown in Figure 7 ;The measured distance values in the figure are 9.65m, 20.50m, 31.35m, 38.85m, and 51.50m respectively; according to the above experimental results, the errors between the measured values obtained by this method and the actual values are all controlled within 5% .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com