Kalman filtering based quadrotor unmanned aerial vehicle attitude data fusion method
A Kalman filtering and data fusion technology, applied in navigation computing tools and other directions, can solve problems such as inability to obtain attitude data in real time and large amount of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
[0049] Specific embodiments one, a kind of method for the fusion of attitude data of quadrotor UAV based on Kalman filter described in this embodiment, carry out according to the following steps:
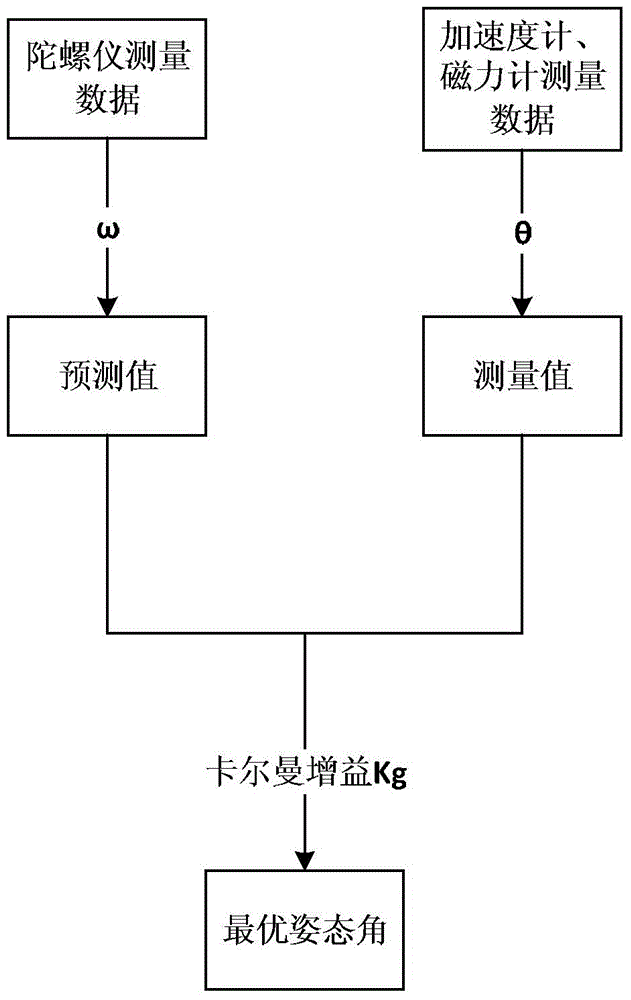
[0050] 1. According to the characteristics of the attitude measurement sensor of the quadrotor drone, select the actual attitude angle θ of the quadrotor drone and the measurement error σ of the gyroscope as the state vector, and the attitude angle θ measured by the acceleration sensor and the magnetic sensor 测 is the observed value, and the corresponding state equation and observation equation of the quadrotor UAV attitude calculation system are obtained, as shown in formula (1),
[0051]
[0052] in is the differential of the actual attitude angle θ of the quadrotor UAV, is the differential of the measurement error σ of the gyroscope, ω is the angular velocity output by the gyroscope, ω 白 is the measurement white noise of the gyroscope, v 白 is the measurement white noise o...
specific Embodiment approach 2
[0090] Specific embodiment 2. This embodiment is a further description of a method for the fusion of attitude data of a quadrotor UAV based on Kalman filtering described in the specific embodiment 1. The actual attitude angle θ described in step 1 is quadrotor The vector angle formed by the drone's actual roll angle, pitch angle, and yaw angle.
[0091] The actual attitude angle θ cannot be directly measured by measuring instruments, only by actually measuring the roll angle, pitch angle and yaw angle of the UAV, and expressing the actual attitude angle θ in the form of a vector.
specific Embodiment approach 3
[0092] Specific embodiment three. This embodiment is a further description of the method for the fusion of attitude data of a quadrotor UAV based on Kalman filtering described in the specific embodiment one. E described in step thirteen A (k), E B (k) and K g (k) is evaluated offline, and the evaluation result is stored in the processor chip of the flight control board.
[0093] E. A (k), E B (k) and K g The evaluation of (k) adopts an off-line method, which greatly reduces the calculation amount of the flight control board processor.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com