Robust adaptive fault-tolerant control method for four-wheel independently driven electric vehicle based on disturbance observation
A four-wheel independent drive, robust and adaptive technology, applied in electric vehicles, control drives, electrical devices, etc., can solve problems such as chattering, and achieve improved safety, improved robustness, and accurate vehicle models. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] The invention provides an adaptive robust fault-tolerant control method for a four-wheel independent drive electric vehicle (4WID-EV) based on disturbance observation. In order to clarify the purpose, technical solution and effect of the present invention, the present invention will be further explained below in conjunction with the drawings.
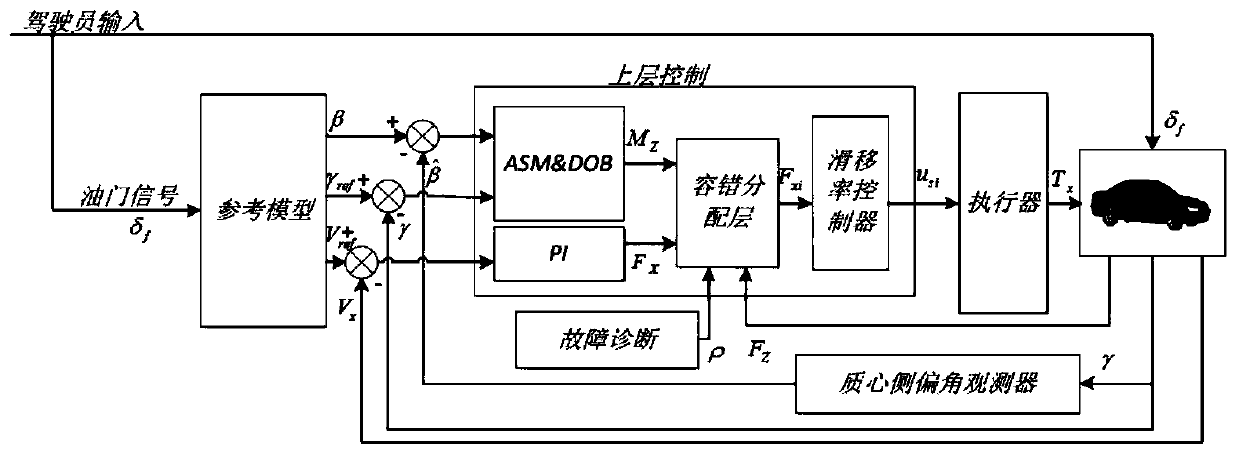
[0019] figure 1 Shown is the structural block diagram of each module of the 4WID-EV control strategy of the present invention, which mainly includes 1, the vehicle reference model, the vehicle reference model mainly generates the ideal center of mass sideslip angle, yaw rate and longitudinal vehicle speed etc. according to the acceleration angle signal, Among them, the center-of-mass sideslip angle signal and the yaw rate signal are sent to the adaptive sliding mode controller, and the ideal longitudinal vehicle speed is sent to the PI control module. 2. The side-slip angle observer module of the center of mass is fed back the la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com