Single-station passive positioning method and device based on extended Kalman filtering
An extended Kalman and passive positioning technology, applied in the field of extended Kalman filtering to locate and track targets, can solve the problems of difficult implementation, large angle information and hardware cost, etc., achieve high utilization rate, reduce hardware cost, and reduce cost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0050] The algorithm flow process that the present invention proposes is as follows:
[0051] 101: Receive incoming signals through receiving device 1 and receiving device 2, perform N-point DFT with Hanning window on the 2-way undersampled signal sample sequence, perform spectrum correction and mode clustering on the DFT results, and apply the Chinese remainder theorem to obtain wave frequency estimation;
[0052] 102: Due to the Doppler effect of the target movement, the receiving frequencies of the two receiving stations are measured at the two measurement moments, and the difference between the four frequency measurement results is obtained. The four frequency differences of the sites;
[0053]
[0054] in, for t 1 The frequency difference between two receiving stations at any time, Δf t2 for t 2 The frequency difference between two receiving stations at any time, Δf 1 is the frequency difference received by receiving station 1 at two moments, Δf 2 is the freque...
Embodiment 2
[0057] 1. Passive monostatic positioning model
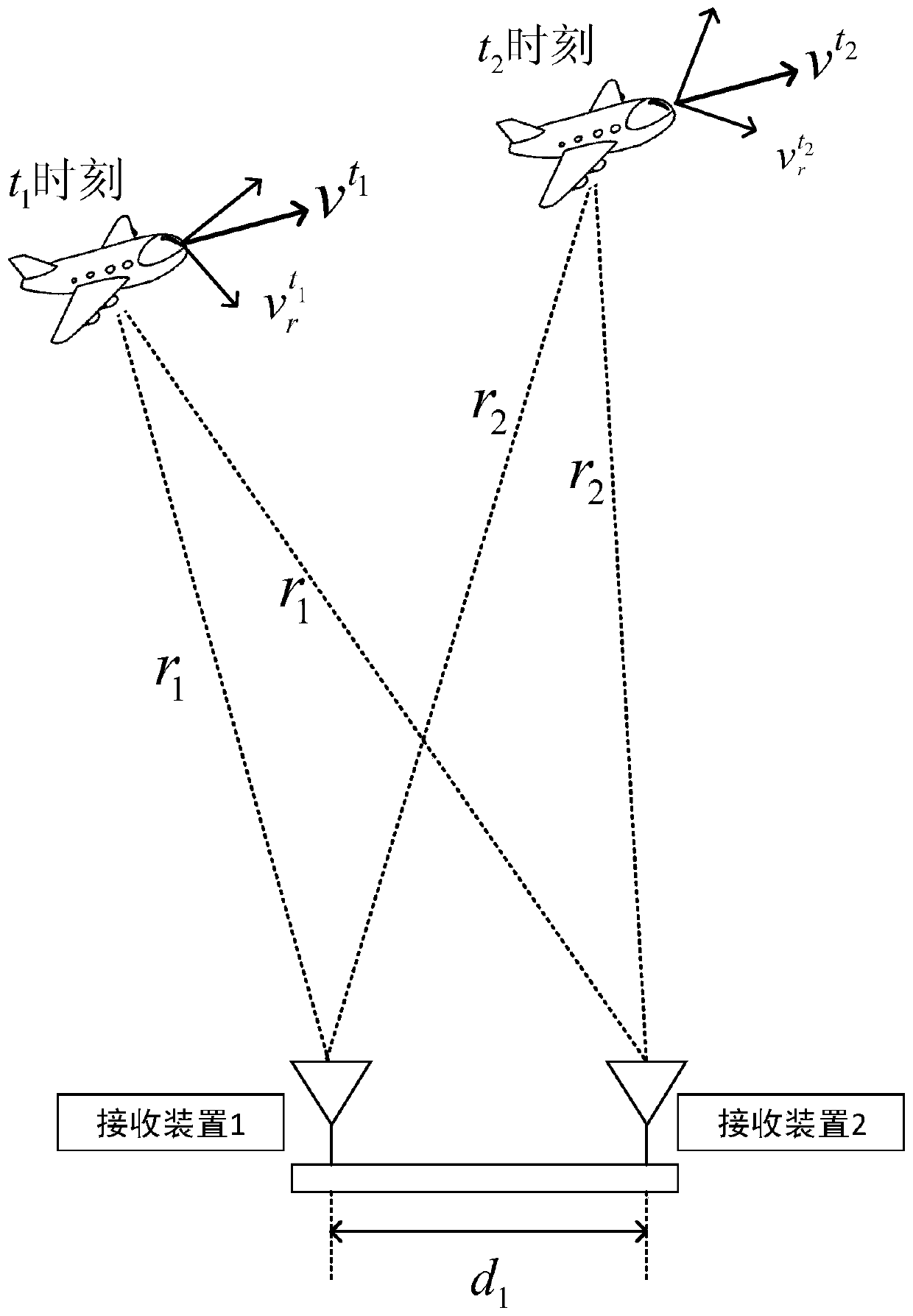
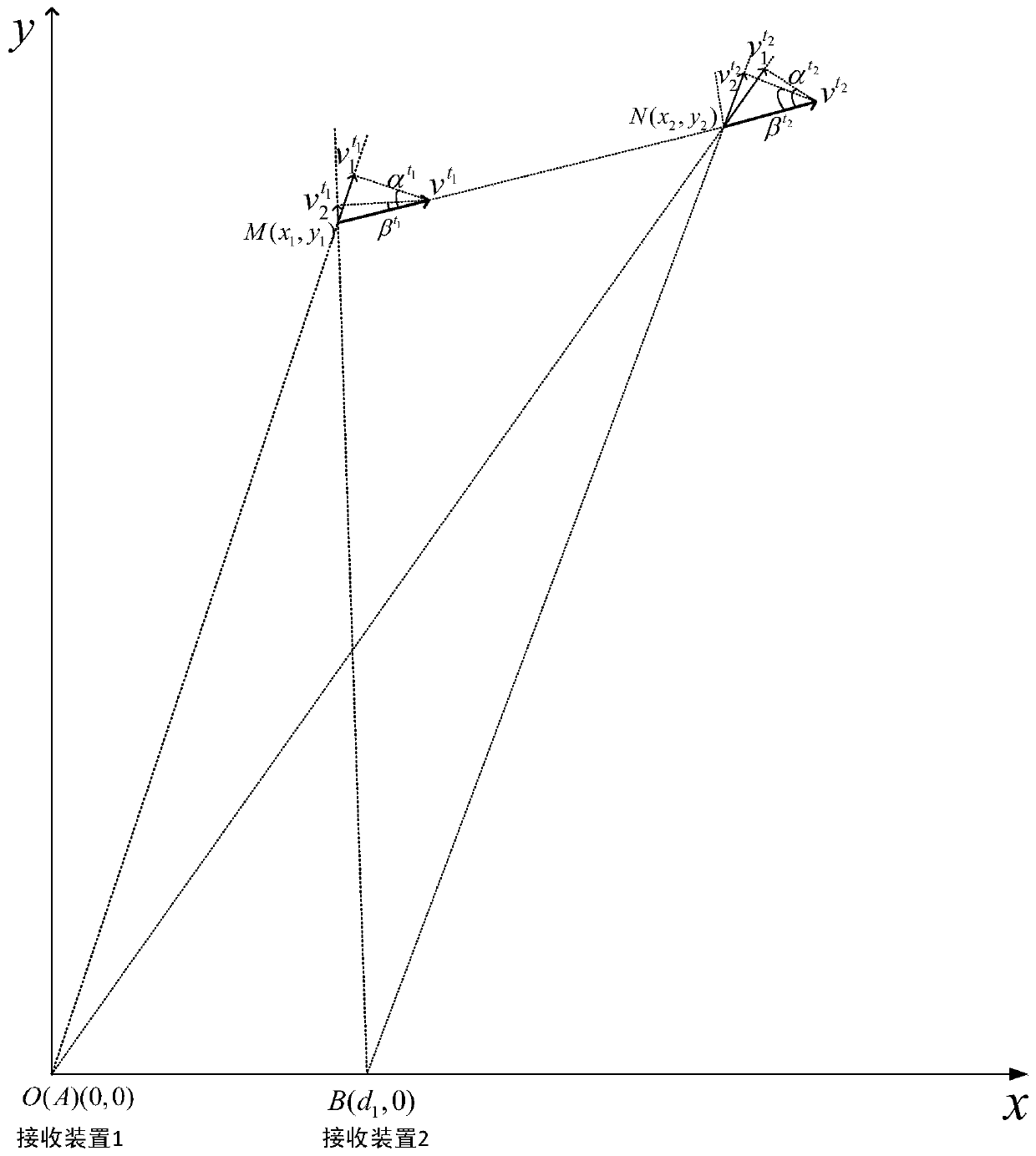
[0058] For the passive positioning of moving targets, the embodiment of the present invention adopts figure 1 The model shown is analyzed. Arrange two sets of receiving devices in the receiving area, the distance is d 1 ; assume t 1 to t 2 At time , the target flies over the receiving area at a constant speed v. at t 1 At time, the space distance between the target and the receiving station is r 1 (Because the distance between the target and the receiving device is far greater than the distance between the adjacent receiving devices, the distances from the target to the two receivers can be approximately regarded as equal), similarly, at t 2 At time, the space distance between the target and the receiving station is r 2 . Establish the relationship between the frequency difference measured by the two stations at the same time and the frequency difference measured by the same station at different times and the position of...
Embodiment 3
[0119] This method uses Relative Range Error (RRE) as an evaluation index to describe the tracking performance of the algorithm, which is defined as:
[0120]
[0121] Assuming that receiving device 1 is the origin of the coordinates, the distance between receiving device 2 and receiving device 1 is 15 meters, and the target radiation source moves from (2000, 500000) m at a uniform velocity with acceleration disturbance of (300, 400) m / s, so the target The initial state is set to (2000,500000,2300,500400)m. The observation period is 1s, and the observation time lasts 100s, and it is assumed that the frequency of the radiation source remains constant at 3GHz during the observation time. Given the accuracy of the Doppler frequency difference between two sets of observations:
[0122]
[0123]
[0124] The initial covariance of the experiment is set to P 0 =diag[900,10 -4 ,900,10 -4 ], the experiment carried out 100 Monte-Carlo simulations, and the results are as fol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com