Quadrocopter vertical wall surface rapid takeoff and landing system and method based on electrostatic adsorption
A four-axis aircraft, electrostatic adsorption technology, applied in the direction of landing gear, aircraft parts, parking devices, etc., can solve the problem that the four-axis aircraft cannot achieve fast and stable landing, and achieve the effect of simple structure, stable take-off and landing, and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
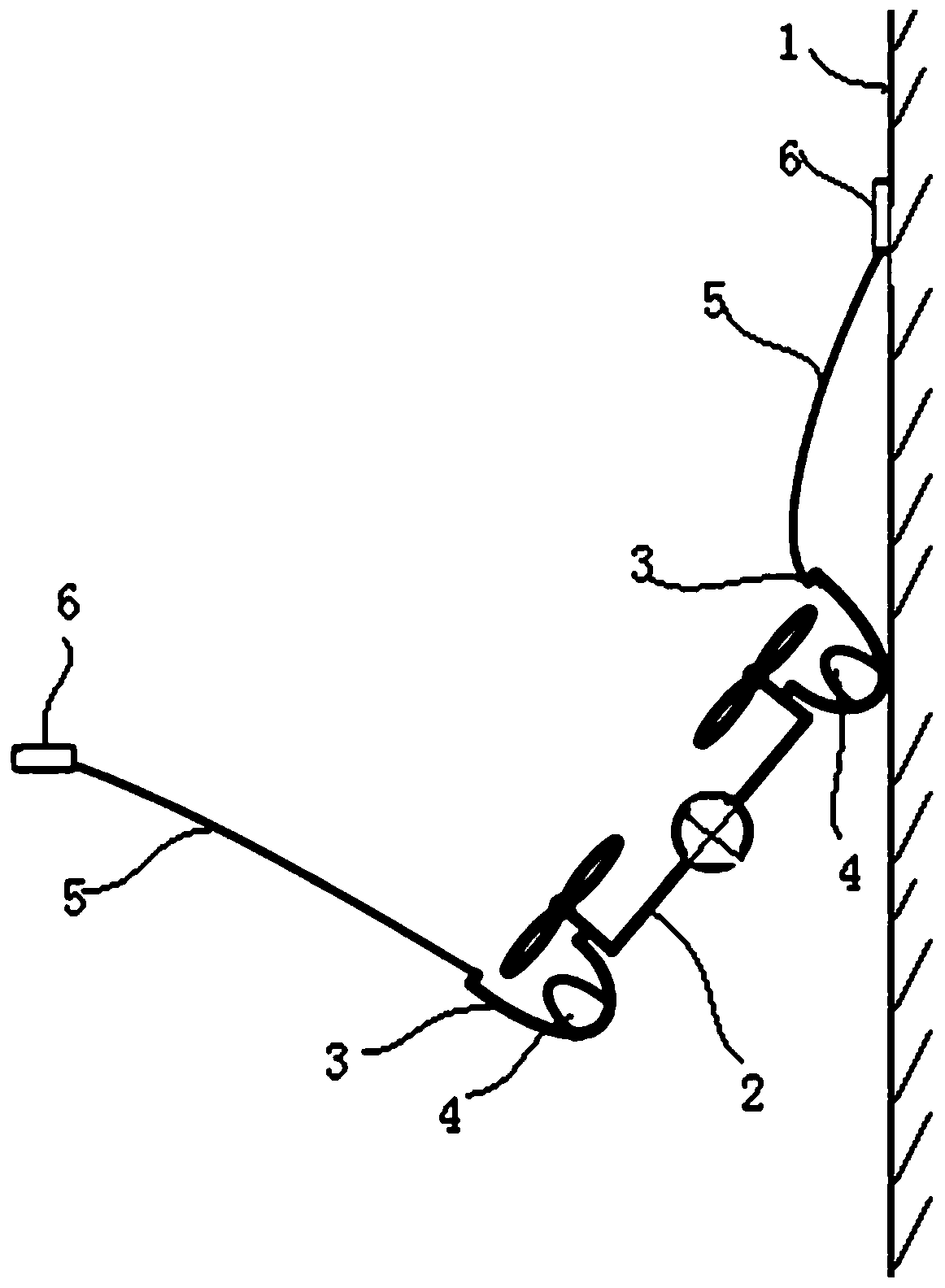
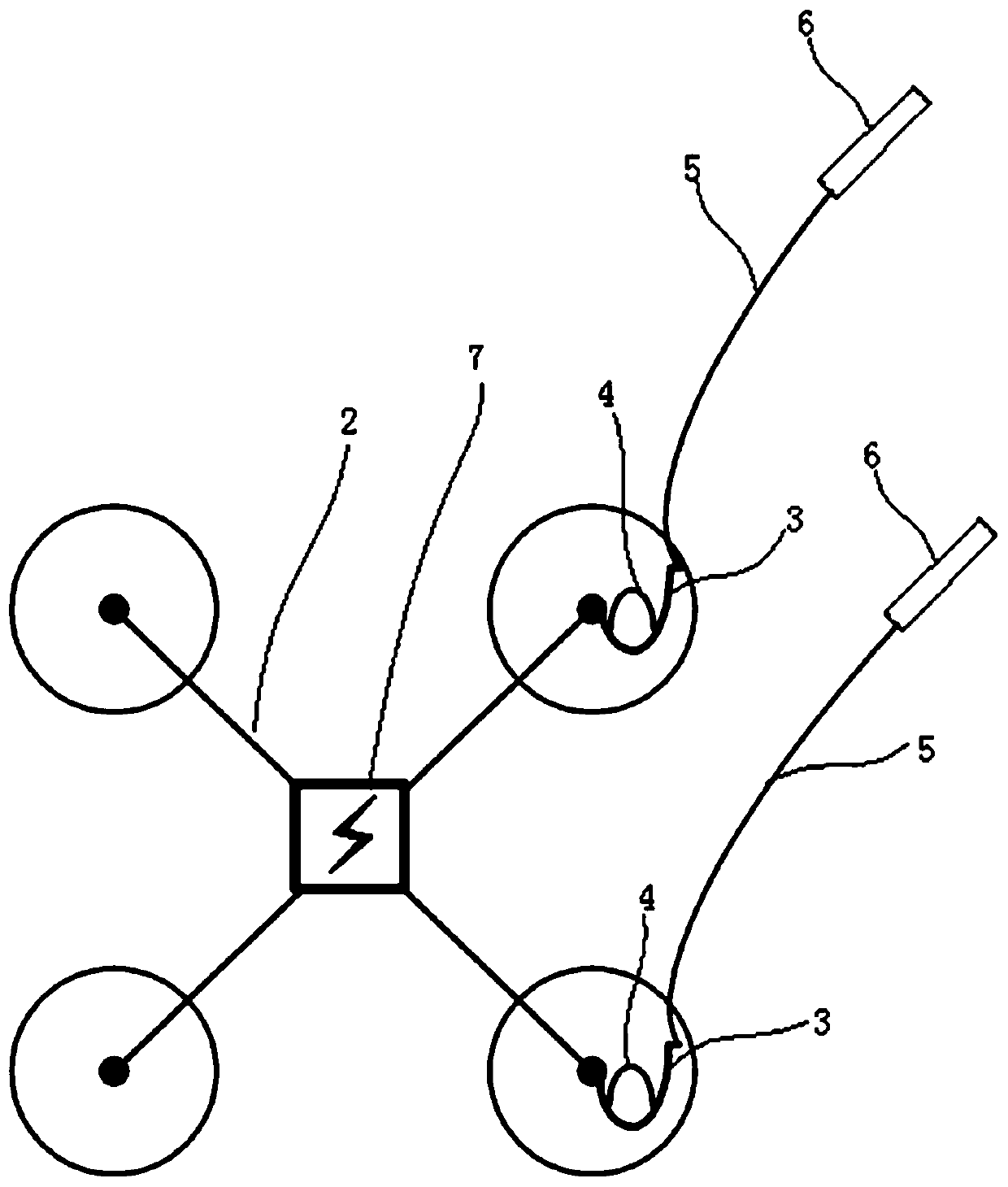
[0049] A fast take-off and landing system for a quadcopter on a vertical wall based on electrostatic adsorption, such as figure 1 and 3 As shown, it includes a four-axis aircraft 2, and two groups of elastic foot bionic structures respectively arranged on two adjacent axes of the four-axis aircraft 2, one end of the elastic foot bionic structure is installed on the motor of the four-axis aircraft 2 On the fuselage, one end of the elastic foot bionic structure extends out of the four-axis aircraft 2 and is connected to an electrostatic adsorption electrode 6, and a high-voltage electrostatic generator 7 is also installed on the four-axis aircraft 2 for generating high-voltage feed The electrostatic adsorption electrode 6 is charged, and the high-voltage electrostatic generator 7 can directly and conveniently obtain working power from the quadcopter 2 .
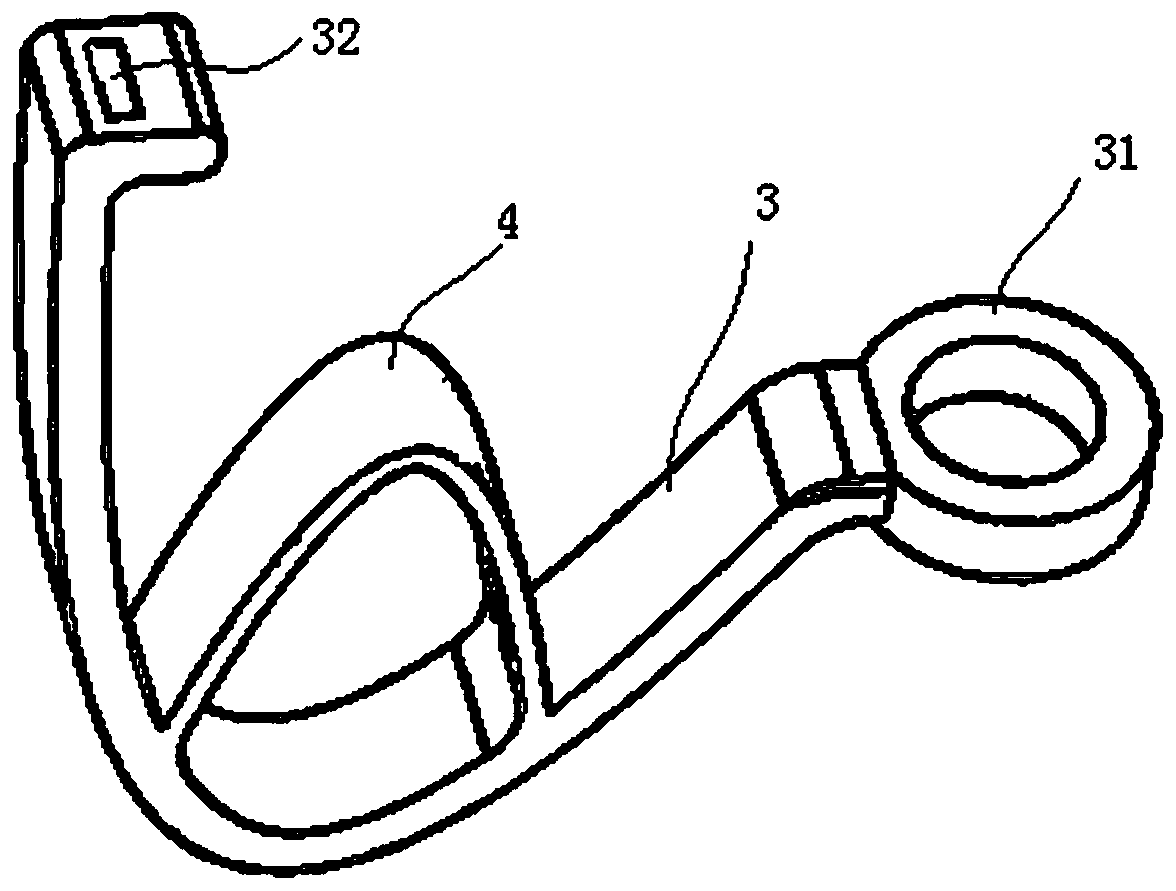
[0050] Among them, such as figure 2 As shown, the elastic foot bionic structure includes a flexible rod 5 and an elastic f...
Embodiment 2
[0054] This embodiment 2 provides a quick take-off and landing method based on the above-mentioned quadrocopter vertical wall quick take-off and landing system, such as Figure 5-10 Shown, the landing process of described quadrocopter 2 is:
[0055] The high-voltage electrostatic generator 7 generates high voltage to charge the electrostatic adsorption electrode 6;
[0056] When the quadcopter 2 is at an initial velocity v 0 When landing and colliding with the wall 1, the electrostatic adsorption electrode 6 contacts and adsorbs on the wall 1; until the elastic foot support 3 collides with the wall 1, a reverse acceleration is generated in its horizontal forward direction, triggering the quadcopter 2 Its own propeller turns off the thrust so that it loses lift;
[0057] At the same time the initial velocity v 0 The component velocity along the fuselage direction of the quadcopter 2 makes the elastic foot support 3 constantly be compressed, and at this moment most of the ini...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com