An anti-interference control method for controlling moment gyro frame servo system
A technology for controlling torque gyroscopes and servo systems, applied in the field of servo system control, can solve problems such as low control accuracy, achieve strong anti-interference ability, low conservatism, and ensure high-precision torque output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
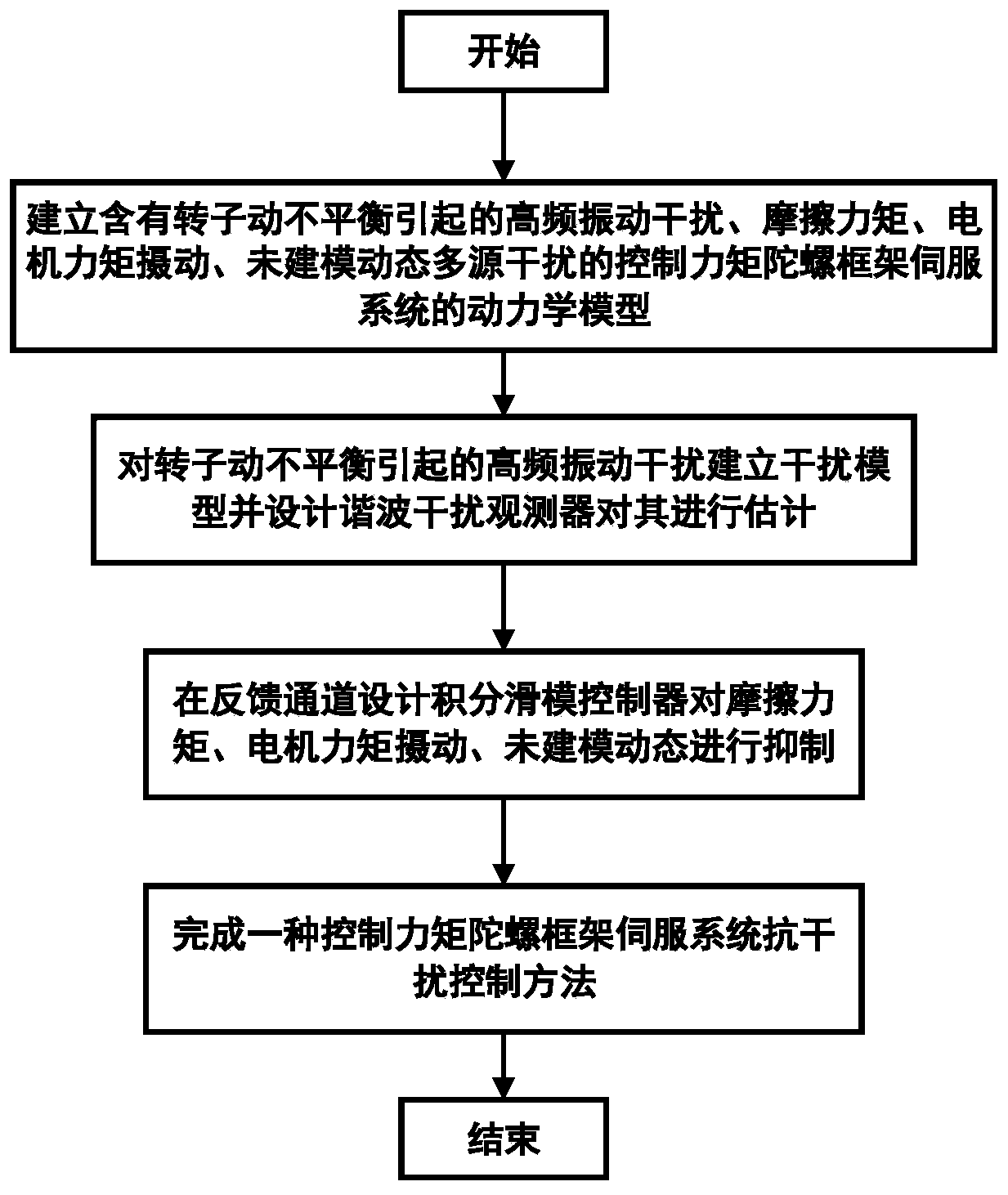
[0043] The steps of an anti-interference control method for controlling a moment gyro frame servo system of the present invention are as follows:
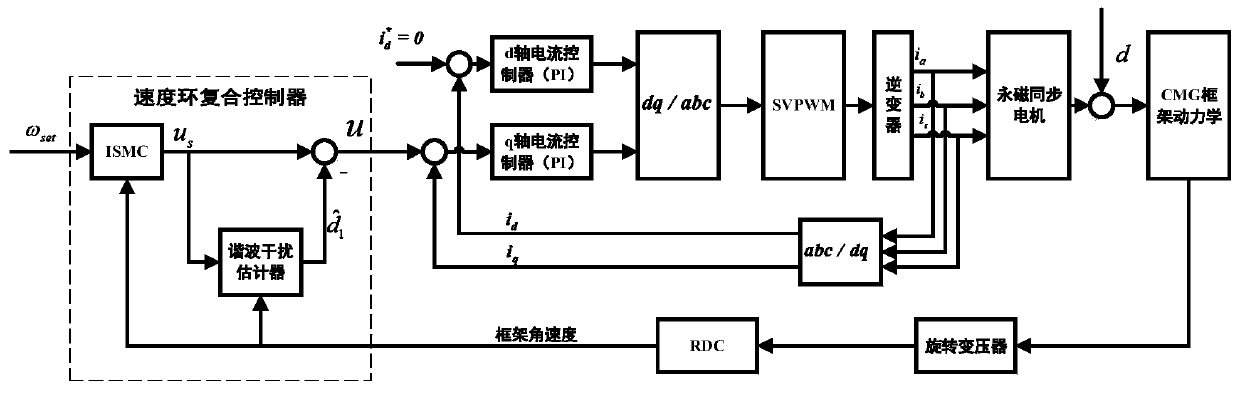
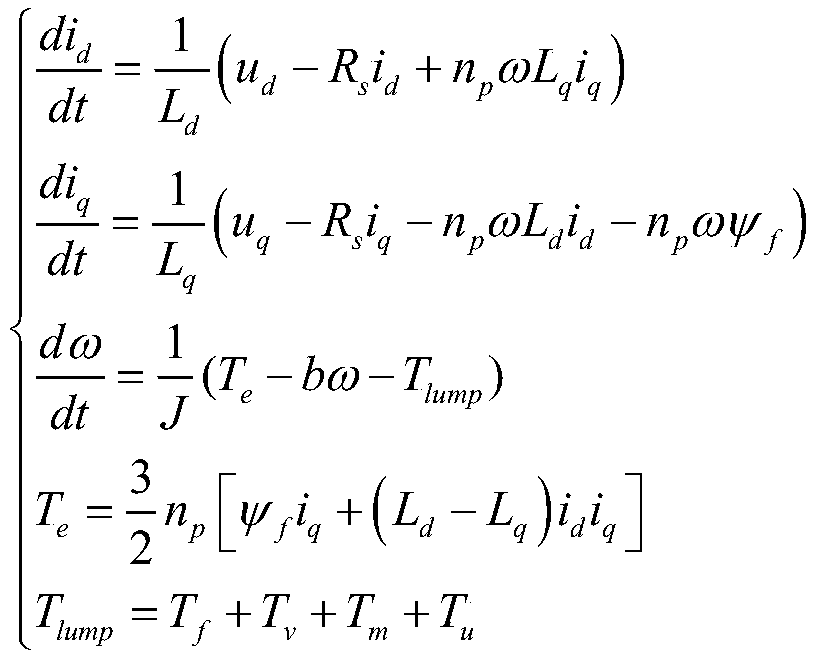
[0044] Such as figure 2 , first collect relevant parameter sample information in the actual operating environment of the control torque gyro frame servo system, and use the least squares identification algorithm to identify the relevant sample information such as stator inductance, stator resistance, and moment of inertia of the frame servo system. According to the mechanics principle and circuit theorem, Establish a dynamic model of the control torque gyro frame servo system including high-frequency vibration interference caused by rotor dynamic unbalance, friction torque, motor torque perturbation, and unmodeled dynamic multi-source interference; Establish a disturbance model based on the high-f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com