Multi-finger dexterous manipulator
A manipulator and dexterous technology, applied in the field of manipulators, can solve the problems of inconvenient multi-directional operation in space, poor dexterity, and rigid structure of the manipulator, and achieve the effect of convenient multi-directional manipulator operation in space, easy to grasp, and convenient and flexible application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
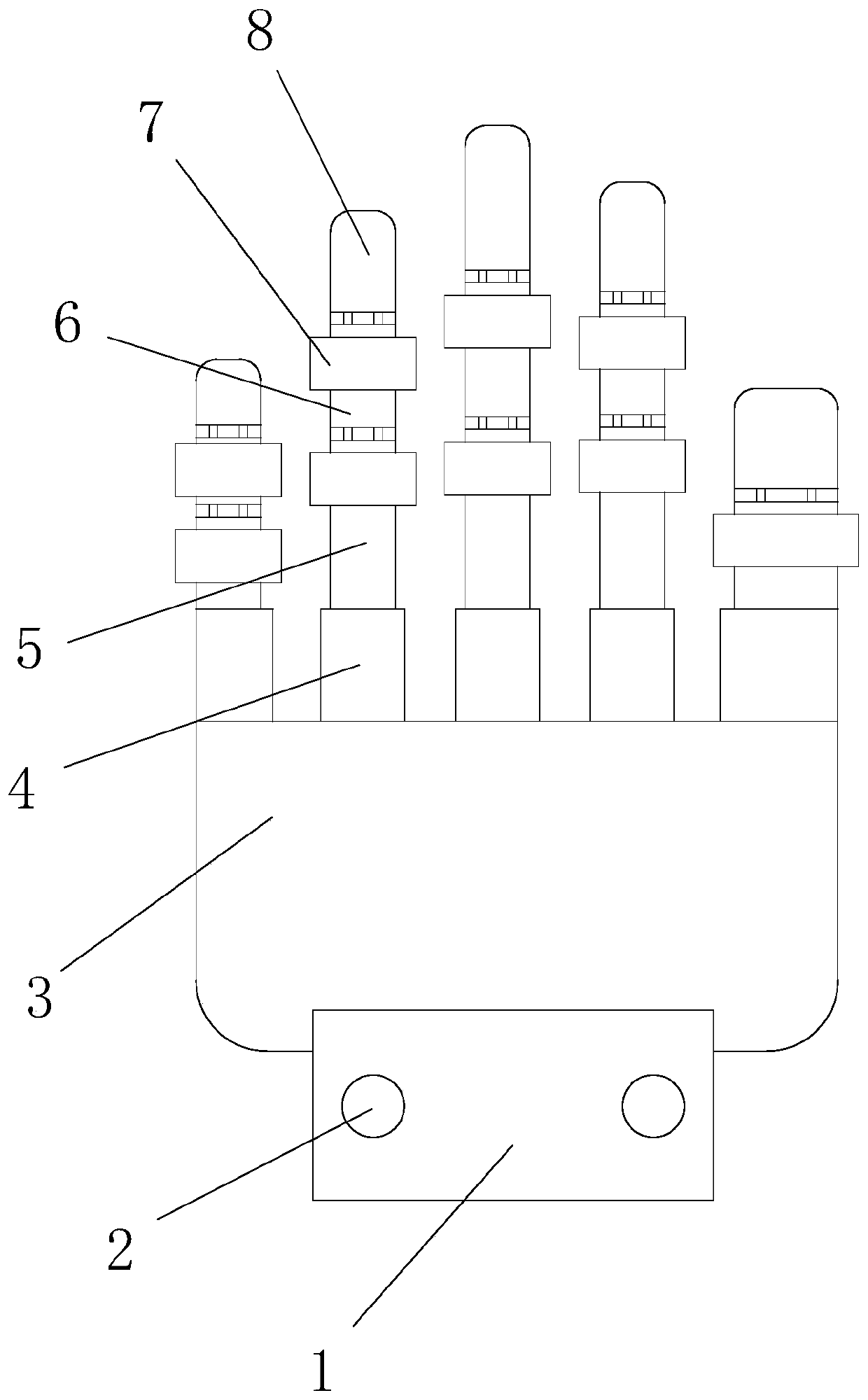
[0033] Embodiment one, with reference to Figure 1~5 , a multi-finger dexterous manipulator, comprising a palm assembly 3, a connecting plate 1 is provided at the bottom of the palm assembly 3, and a fixing hole 2 is provided on the connecting plate 1 to facilitate the installation of the palm assembly 3; the palm assembly 3 is provided with A plurality of finger assemblies, the finger assembly includes a plurality of knuckles, and the knuckles are connected to and rotated by the joint assembly. The corresponding finger assembly on the palm assembly 3 is provided with a finger base 4, and the finger assembly and the finger base 4 Axial swivel connection.
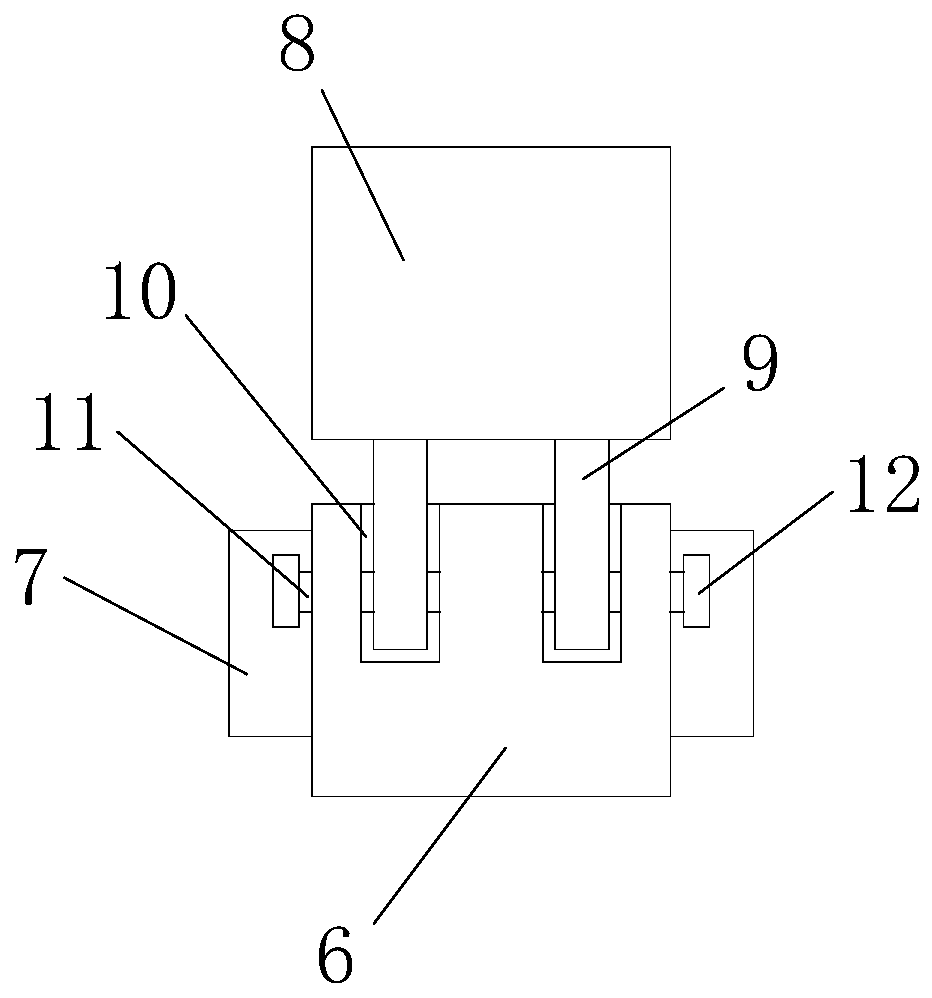
[0034]Wherein, the joint assembly includes a chute 10, the chute 10 is arranged on the top of the knuckle 6 near the palm assembly side, and two chute 10 are arranged symmetrically along the top of the knuckle, and the knuckle 10 on the side away from the palm assembly The bottom of joint 8 is correspondingly fixed with sli...
Embodiment 2
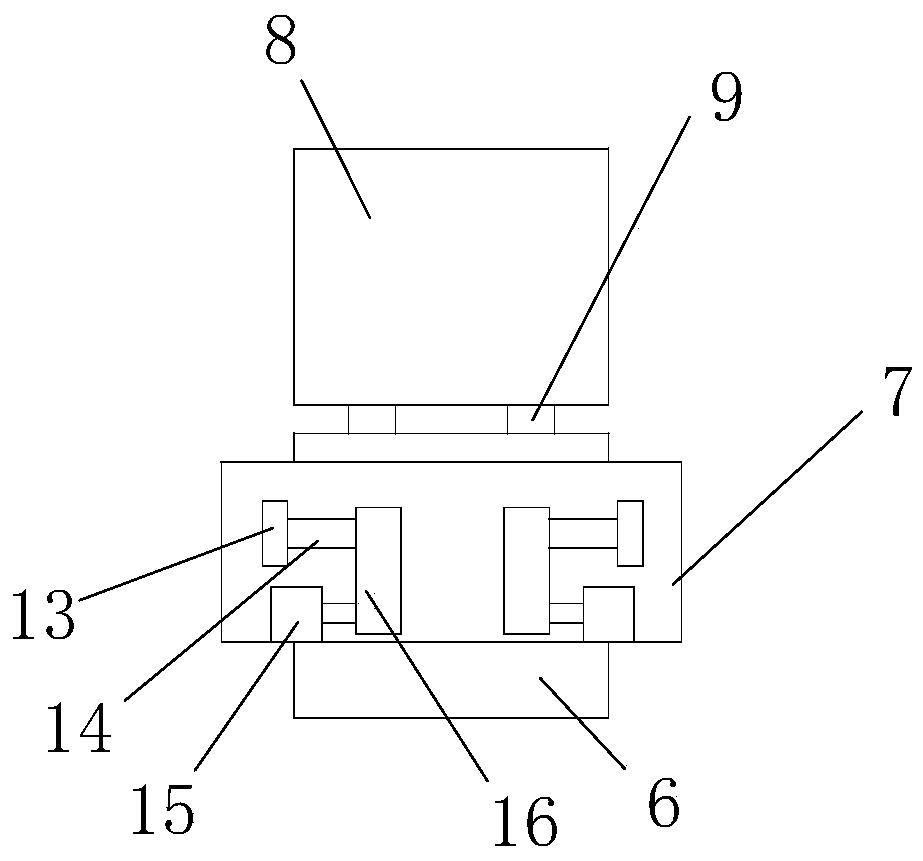
[0040] Embodiment two, refer to Figure 6 , this embodiment adds the following technical features on the basis of Embodiment 1:
[0041] Described palm assembly 3 is provided with main board 26, and main board 26 is provided with MCU27, and main board 26 is provided with joint motor interface 29 and root motor interface 30 connected with MCU27, and joint motor 15 in the finger assembly is connected to joint motor interface respectively. 29; the root motor 22 in the palm assembly 3 is respectively connected to the knuckle motor interface, and the main board 26 is also provided with a control signal interface 31 and a network module 28; the main board 26 receives the control signal through the control signal interface 31 to control the joint The motor 15 and the root motor 22 rotate to flexibly control the finger assembly.
Embodiment 3
[0042] Embodiment three, refer to Figure 7 , this embodiment adds the following technical features on the basis of Embodiment 2:
[0043] The top knuckle of the finger assembly is provided with an installation hole 8-1, which is convenient for installing hardware on the finger assembly and further facilitates use.
[0044] Working principle: the present invention provides a multi-finger dexterous manipulator with ingenious structure and reasonable arrangement. The present invention holds and rotates the knuckles to make the finger assembly similar to the human finger grip and dexterous operation. Further, the present invention combines the finger assembly with the The axial rotation connection of the palm assembly enables the finger assembly to rotate, which further greatly facilitates the flexible application of the finger assembly. The rotation of a single or multiple finger assemblies breaks through the disadvantages of human fingers and existing manipulators that cannot b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com