Fuzzy Adaptive Dynamic Surface Control Method for Induction Motor Stochastic System
A technology of asynchronous motor and dynamic surface control, which is applied in motor control, motor generator control, electronic commutation motor control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0140] The basic idea of the present invention is: use fuzzy logic system to approximate unknown random nonlinear function in asynchronous motor random system, and at the same time, based on Lyapunov function, use backstepping method to construct intermediate virtual control signal, gradually recursively obtain control law, thereby ensuring voltage stability In a bounded area, reduce control error and improve control accuracy.
[0141] The present invention will be further described in detail below in conjunction with the drawings and specific implementations:
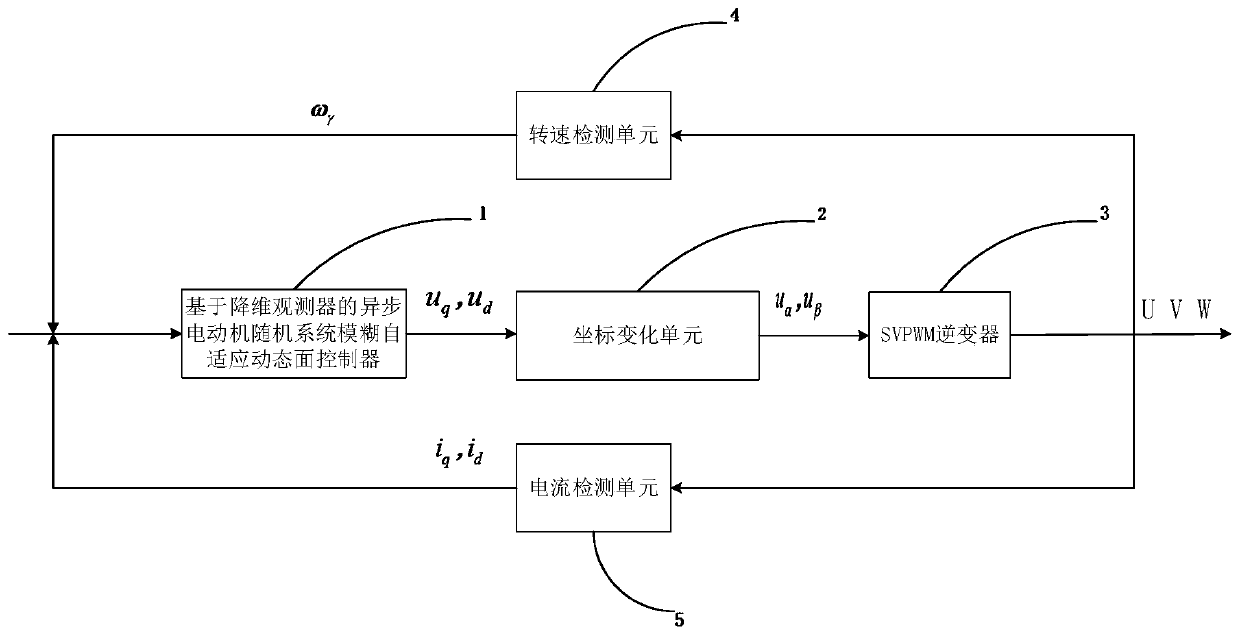
[0142] Such as figure 1 As shown, the fuzzy adaptive dynamic surface control method of asynchronous motor random system based on dimensionality reduction observer mainly includes the fuzzy adaptive dynamic surface fuzzy adaptive backstepping controller of asynchronous motor random system based on dimensionality reduction observer1 , Coordinate transformation unit 2, SVPWM inverter 3, rotation speed detection unit 4 and c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com