Pavement marking automatic extraction method and device
An automatic extraction and road marking technology, applied in image data processing, 3D modeling, instruments, etc., can solve the problems of high registration requirements between image and point cloud data, and achieve the goal of reducing the amount of computation and the rate of false extraction Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
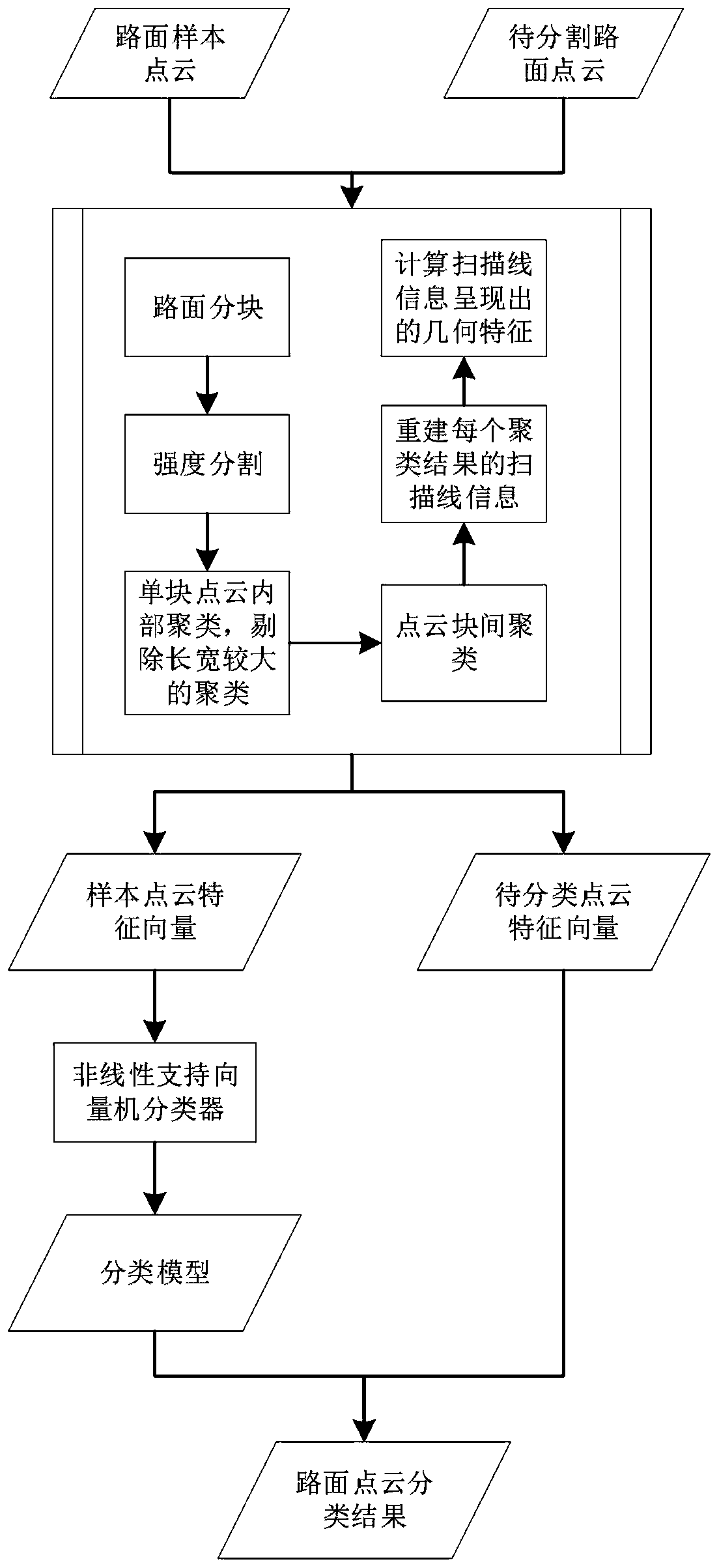
[0046] Such as figure 1 As shown, the embodiment of the present invention provides a method for automatically extracting road markings, including the following steps:
[0047] S1, select various road surface point cloud samples, generate corresponding feature vectors according to the three-dimensional information of the road surface point cloud, use the generated feature vectors to train the nonlinear support vector machine, and obtain the classification model;
[0048] S2. Process the point cloud of the road surface to be classified, generate a corresponding feature vector according to the three-dimensional information of the point cloud of the road surface, and classify the point cloud to be classified by using the classification model.
[0049] The embodiment of the present invention utilizes the three-dimensional information of point cloud coordinates, calculates feature vectors according to the three-dimensional information, and classifies the calculated feature vectors in ...
Embodiment 2
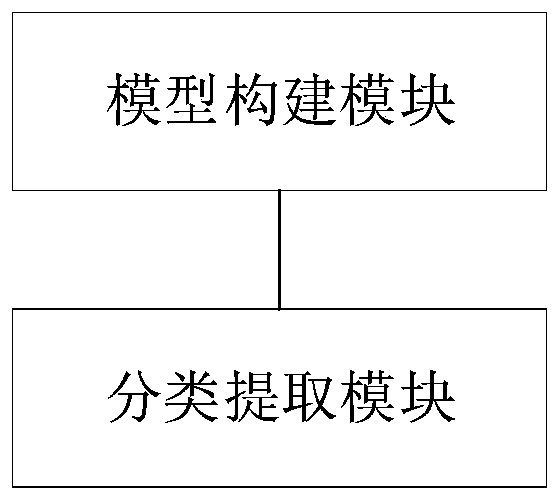
[0074] Such as figure 2 As shown, the embodiment of the present invention provides a device for automatically extracting road markings, including:
[0075] The model building module is used to select various types of road surface point cloud samples, generates corresponding feature vectors according to the three-dimensional information of the road surface point clouds, and uses the generated feature vectors to train the nonlinear support vector machine to obtain a classification model;
[0076] The classification extraction module is used to process the point cloud of the road surface to be classified, generate a corresponding feature vector according to the three-dimensional information of the point cloud of the road surface, and use the classification model to classify the point cloud to be classified.
Embodiment 3
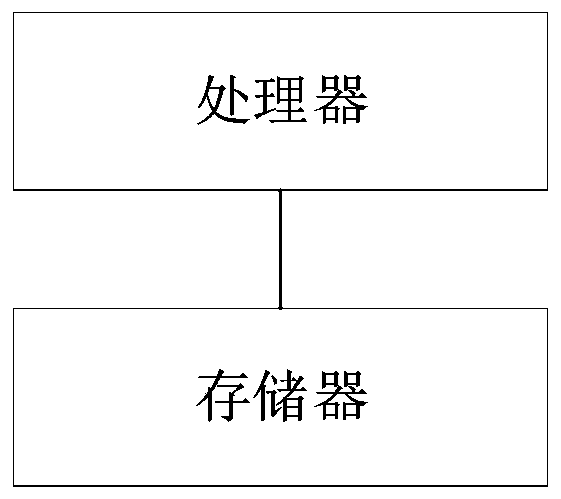
[0078] Such as image 3 As shown, the embodiment of the present invention provides a device for automatically extracting road markings, including:
[0079] memory for storing computer software programs;
[0080] The processor is configured to read and execute the computer software program stored in the memory to implement the method for automatically extracting road markings in the first aspect.
[0081] Those skilled in the art can understand that all or part of the steps in the method of the above-mentioned embodiments can be completed by instructing related hardware through a program. The program can be stored in a computer-readable storage medium, and the program can be executed when executed. , including the following steps: (method steps), the storage medium, such as: ROM / RAM, magnetic disk, optical disk, etc.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com