Under-actuated UUV trajectory tracking sliding-mode control method for input time lag
A technology of trajectory tracking and control method, applied in non-electric variable control, control/regulation system, height or depth control, etc., can solve the problems of increased system overshoot, unstable system divergence, and poor control effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0107] The present invention will be further described below in conjunction with the accompanying drawings.
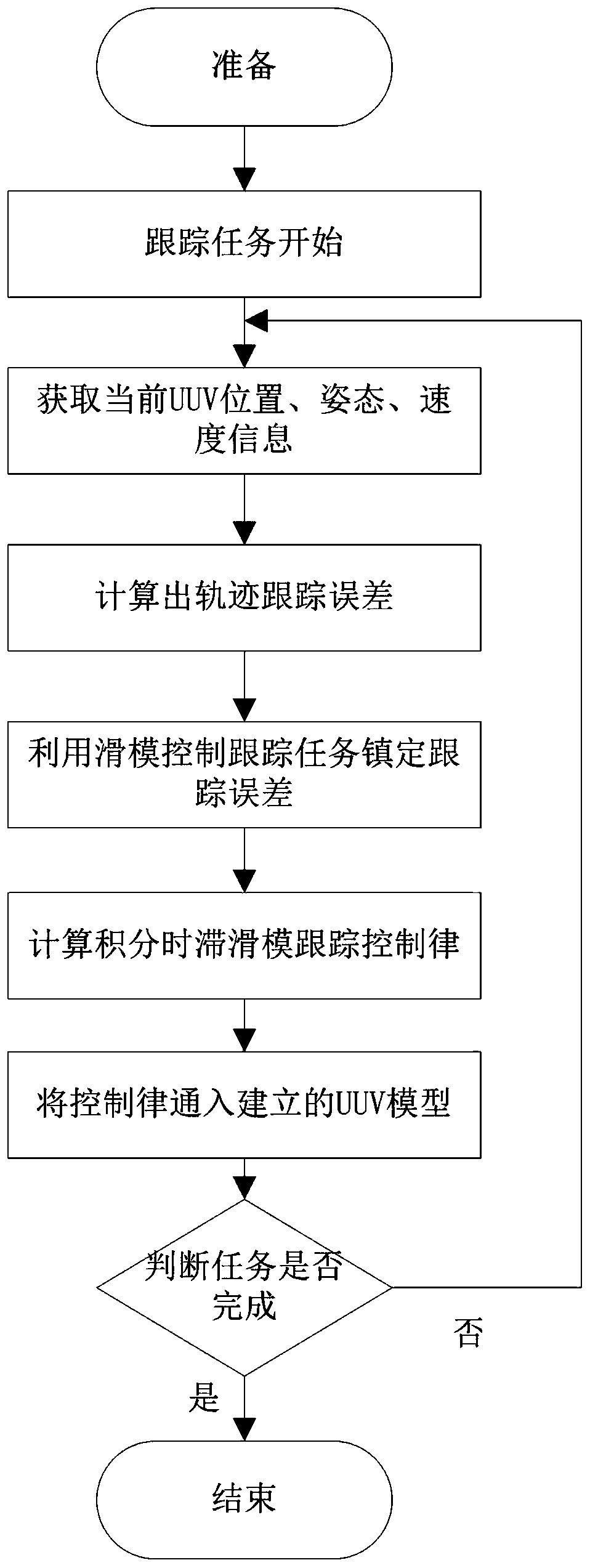
[0108] A method for sliding mode control of underactuated UUV trajectory tracking for input time lag, comprising the following steps:
[0109] In step 1, according to the current task, the UUV gives the expected trajectory position information to the UUV, and collects data through the on-board navigation equipment and sensors to obtain the current position X(t)=[x(t),y(t),z (t)] T Information, attitude [θ(t), ψ(t)] T Information, speed V(t)=[u(t), v(t), w(t), q(t), r(t)] T information.
[0110] In step 2, using the information in step 1, the underactuated UUV model is simplified to a UUV five-degree-of-freedom time-delay motion model, and the position and attitude information of the desired trajectory at the current moment is derived to obtain the tracking pose error and tracking velocity error.
[0111] The mathematical model of the underactuated UUV involved incl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com