Workpiece identification and positioning method and system based on depth camera and sorting system
A technology of depth camera and positioning method, which is applied to computer components, character and pattern recognition, manipulators, etc., can solve the problems of relying on initial values and limited precision, and achieve the effect of shortening time, improving precision and realizing estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
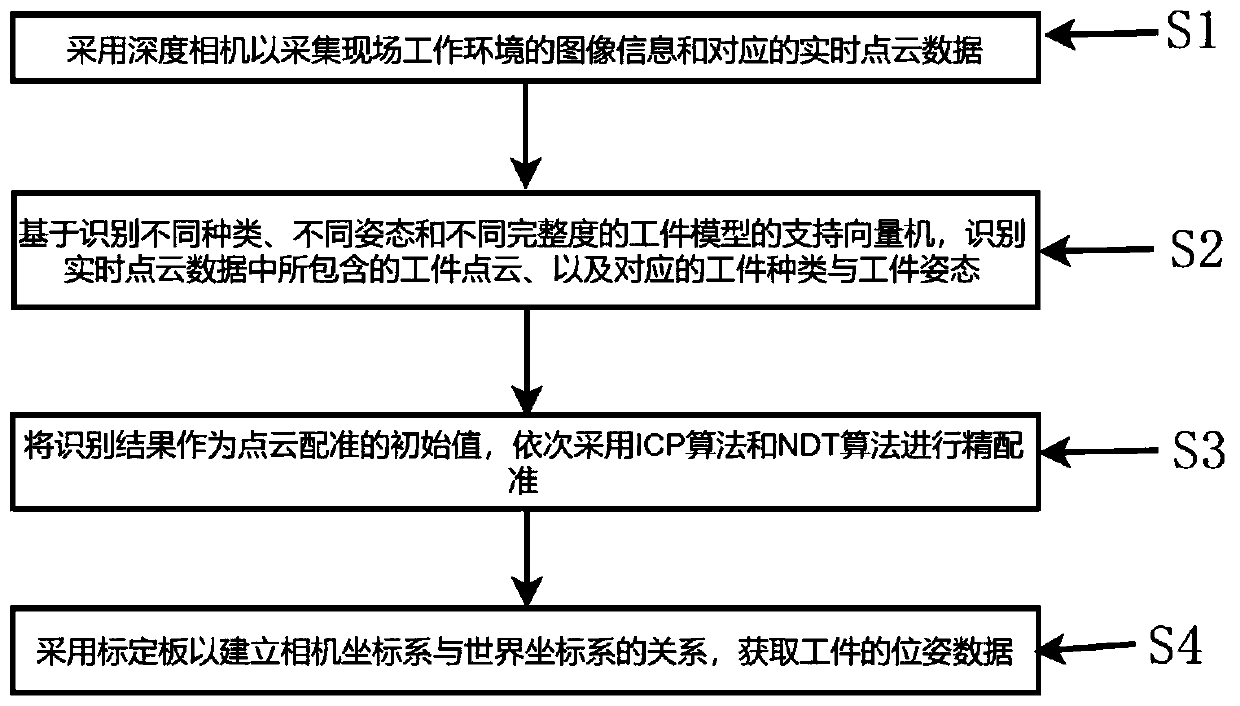
[0058] combine figure 1 , the present invention proposes a workpiece recognition and positioning method based on a depth camera, the method comprising:
[0059] S1: The depth camera is used to collect the image information of the on-site working environment and the corresponding real-time point cloud data.
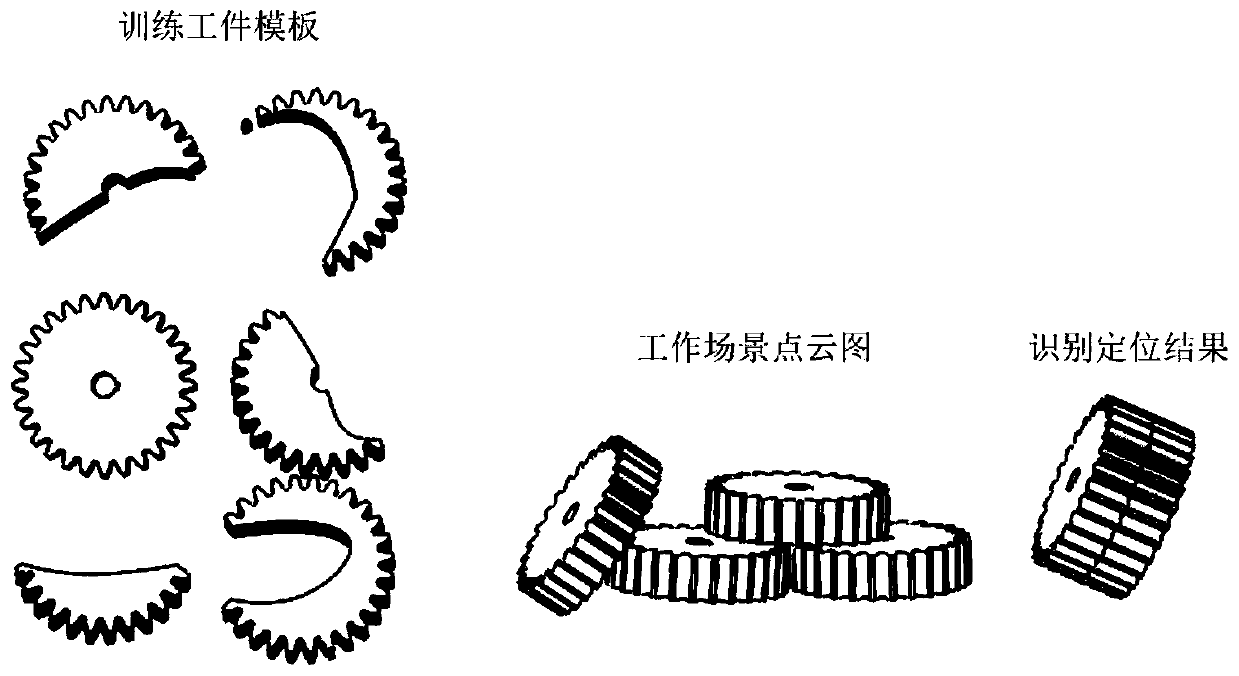
[0060] S2: Based on the support vector machine that recognizes workpiece models of different types, different attitudes and different degrees of integrity, identify the workpiece point cloud contained in the real-time point cloud data, as well as the corresponding workpiece type and workpiece posture.
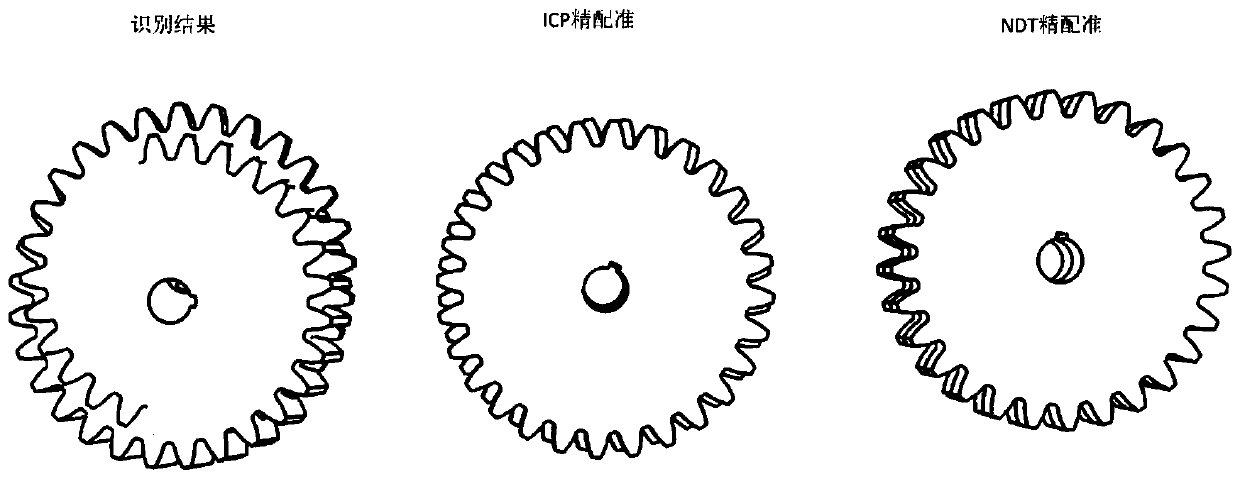
[0061] S3: The recognition result is used as the initial value of the point cloud registration, and the ICP algorithm and the NDT algorithm are used in turn for fine registration.
[0062] S4:...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com